Preface
About this guide
Most of you have probably experienced the process of writing a user guide. It is a terribly challenging experience.
We struggled to try to figure out the best way to write our manuals for years. Sometimes you think no matter what you write, nobody is going to read it. But, sometimes, you do get feedback from others and you’re convinced even the smallest detail must be written down, because someone will find it or miss it.
Then there’s the writing style. When we started back in 2005, we created something closer to a reference guide. It was painful to write, and I’m sure it was painful to read too. But, we tried with general examples, with a professional and impersonal tone… that’s what we thought would work at the time.
Later, we found out from our own blogging experience that good examples and a personal writing tone worked better. It seems we humans are much better at extracting general cases from particular ones than vice versa. And, they are much easier to write too.
The thing is that, after almost one-and-a-half decades in the making, the original reference style still persisted. So, we finally decided to go for a complete rewrite of our end-user manuals, applying all the lessons we learned along the way.
I still love the old user manuals that came with computers in the 1980s. You know, they were not just about how to use the thing, but about really becoming a master. My first programming book was a user manual from my first Amstrad PCW 256. I miss these manuals. Now, you usually don’t even get one when you receive a new laptop. I’m not sure if I’d really appreciate getting a copy of some C/C#/Javascript/whatever programming manual anyway, but it is all about nostalgia.
Anyway, this guide is not just about Plastic SCM. It is about how to become a better software developer mastering version control. It somehow tries to bring back some nostalgia from the old manuals, mixed with the "don’t write a reference guide anymore" hard-learned lesson.
It is prescriptive and opinionated sometimes, which now I think is a good thing because we propose things, then it is your choice to apply them. If we simply leave everything as an exercise to the reader, if we stay independent, then there’s not much value for you to extract as a reader. You can agree or disagree with us, but both will be valuable takeaways.
For years, we thought it would be too pretentious to tell teams how they should use our tool and implement version control. But, as I said, we learned that you choose our product not only because of the binaries you download; but also to save hours of expert-seeking efforts and benefit from our own experience. We build a version control platform; we work with hundreds of teams around the world, we might be mistaken, but you can definitely benefit from our mistakes and wise choices.
This guide is our best attempt to put together all we know about version control and how to implement it, written in the most concise and personal way we know. We hope you enjoy it and find it helpful because that’s the only reason why we wrote it.
Welcome
Welcome to Plastic SCM!
If you’re reading this, chances are you’re interested in mastering version control and going beyond the most common tools and practices.
This guide will help you understand Plastic SCM, the underlying philosophy, and best practices it is built upon. It will also help you decide if it is the right tool for you or how to master it if you’ve already decided to use it.
Starting up
Let’s map a few concepts
Before we start, I’d like to compare a few concepts from Plastic SCM to other version control systems, so everything will be much easier for you to understand in the following sections.
| Plastic SCM | Git | Perforce | Comment |
|---|---|---|---|
Checkin |
Commit |
Submit |
To Checkin is to submit changes to the repository. |
Changeset |
Commit |
Changelist |
Each time you checkin, you create a new changeset. (In this book, We’ll use the abbreviation cset for changeset and csets for changesets.) |
Update |
Checkout |
Sync |
Download content to the local working copy. This happens, for instance, when you switch to a different branch. |
Checkout |
--- |
Edit |
When you checkout a file in Plastic, you’re telling Plastic you are going to modify the file. It is not mandatory and you can skip this step. But, if you are using locks (exclusive access to a file), then checkouts are mandatory. |
main |
master |
main |
A.k.a. trunk in Subversion. The main branch always exists in a repository when you create it. In Plastic, you can safely rename it if needed. |
Repository |
Repository |
Depot |
The place where all versions, branches, merges, etc. are stored. |
Workspace |
Working tree |
Workspace |
The directory where your project is downloaded to a local disk and you use to work. In Git, the repo/working copy are tightly joined (the repo is inside a .git directory in the working copy). In Plastic, you can have as many workspaces as you want for the same repo. |
Now you might be wondering: Why don’t you version control designers simply use the same consistent naming convention for everything? The explanation could be really long here, but… yes, it’s just to drive you crazy 😉
A perfect workflow
It is a good idea to start with a vision of what is achievable. And that’s precisely what I’m going to do. First, I will describe what we consider to be state of the art in development workflows, what we consider to be the perfect workflow.

Key steps
- Task
-
It all starts with a task in your issue tracker or project management system: Jira, Bugzilla, Mantis, Ontime, or your own homemade solution. The key is that everything you do in code has an associated task. It doesn’t matter whether it is a part of a new feature or a bugfix; create a task for it. If you are not practicing this already, start now. Believe me, entering a task is nothing once you and your team get used to it.
- Task branch
-
Next, you create a branch for the task. Yes, one branch for each task.
- Develop
-
You work on your task branch and make as many checkins as you need. In fact, we strongly recommend checking in very, very often, explaining each step in the comments. This way, you’ll be explaining each step to the reviewer, and it really pays off. Also, don’t forget to add tests for any new feature or bugfix.
- Code review
-
Once you mark your task as completed, it can be code reviewed by a fellow programmer. No excuses here, every single task needs a code review.
- Validation
-
There is an optional step we do internally: validation. A peer switches to the task branch and manually tests it. They don’t look for bugs (automated tests take care of that) but look into the
solution/fix/new-featurefrom a customer perspective. The tester ensures the solution makes sense. This phase probably doesn’t make sense for all teams, but we strongly recommend it when possible. - Automated testing and merge
-
Once the task is reviewed/validated, it will be automatically tested. (After being merged but before the merge to be checked in. More on that later). Only if the test suite passes the merge will it be confirmed. This means we avoid breaking the build at all costs.
- Deploy
-
You can get a new release after every new task passes through this cycle or if you decide to group a few. We are in the DevOps age, with continuous deployment as the new normal, so deploying every task to production makes a lot of sense.
I always imagine the cycle like this:

As you can see, this perfect workflow aligns perfectly with the DevOps spirit. It is all about shortening the task cycle times (in Kanban style), putting new stuff in production as soon as possible, deploying new software as a strongly rooted part of your daily routine, and not an event as it still is for many teams.
Our secret sauce for all these is the cycle I described above. That can be stated as follows: The recipe to safely deliver to production continuously: short-lived task branches (16h or less) that are reviewed and tested before being merged to main.
Workflow dynamics
How does all the above translate to version control? The "One task - one branch" chapter is dedicated to this, but let’s see a quick overview.
I’ll start after you create a task for a new work to be done, and you create a new branch for it:

Notice that we recommend a straightforward branch naming convention: a prefix (task in the example) followed by the task number in the issue tracker. Thus, you keep full traceability of changes, and it is as simple as it can be. Remember, Plastic branches can have a description too, so there is room to explain the task. I like to copy the task headline from the issue tracker and put it there, although we have integrations with most issue trackers that will simply do that automatically if you set it up.
Now, you check in the changes you make to implement your task. Your task will look as follows (if it is a long task taking a few hours, you should have way more than a couple of checkins). Notice that, the main branch has also evolved (I’m just doing this to make the scenario more realistic).

After more work, your task is completed in terms of development. You mark it as solved with an attribute (status) set to the task. Alternatively, you can mark it as completed in your issue tracker. It all depends on your particular toolset and how you will actually end up implementing the workflow.

Now it’s the reviewer’s turn to look at your code and see if they can spot any bugs or something in your coding style or particular design that should be changed.
As I described earlier, once the review is ok, a peers could do a validation too.
If everything looks good, the automatic part kicks in; your code merges and is submitted to the CI system to build and test.

Two important things to note here:
-
The dashed arrows mean that the new changeset is temporary. We prefer not to check in the merge before the tests pass. This way, we avoid broken builds.
-
We strongly encourage you to build and pass tests on the merged code. Otherwise, tests could pass in isolation in
task1213but ignore the new changes on the main branch.
Then the CI will take its time to build and pass tests depending on how fast your tests are. The faster, the better!
If tests pass, the merge will be checked in (confirmed), and your task branch will look something like this:

Notice the status is now set to merged. Instead of an attribute set to the branch, you could track the status in your issue tracker (or on both, as we do internally).
If the new release is ready to be deployed, the new changeset on main is labeled as such and the software deployed to production (or published to our website as we do with Plastic SCM itself):

How to implement
By now, you must have a bunch of questions:
-
What parts of what you describe are actually included in Plastic?
Easy. Plastic is a version control. So we help you with all the branching and merging. Branching and merging (even the visualization you saw in the examples above) are part of the product. Plastic is not a CI system, but it is a coordinator (thanks to mergebots, more on that later), so it can trigger the builds, automate the merges, perform the labeling, and more.
-
What CI systems does Plastic integrate with?
Virtually all of them because Plastic provides an API. But out of the box, it integrates with Jenkins, Bamboo, and TeamCity.
-
You mentioned you have a CI coordinator. Can’t I simply just go and plug my own CI?
Of course, you can plug in your own CI and try to implement the cycle above. We have done a lot of times with customers.
-
Do I need a CI system and an issue tracker to implement task branches?
If you really want to take full advantage of the cycle above and complete automation, you should. But you can always go manually: you can create task branches, work on them, and have someone in the team (integrator/build-master) doing the merges. That’s fine, but not state of the art. We used to do it this way ourselves some time ago.
Where are you now?
You might be ahead of the game I described above. If that’s the case, we still hope you can fit Plastic into your daily work.
If that’s not the case, if you think this is a good workflow to strive for, then the rest of the book will help you figure out how to implement it with Plastic SCM.
Are task branches mandatory in Plastic SCM?
Nope! Plastic is extremely flexible and you’re free to implement any pattern you want.
But, as I mentioned in the introduction, I’m going to be prescriptive and recommend what we truly believe to work.
We strongly trust task branches because they blend very well with modern patterns like trunk based development, but we’ll cover other strategies in the book.
For instance, many game teams prefer working on a single branch, always checking in the main branch (especially artists), which is fine.
What is Plastic SCM
Plastic SCM is a full version control stack designed for branching and merging. It offers speed, visualization, and flexibility.
Plastic is perfect for implementing "task branches," our favorite pattern that combines really well with trunk-based development, DevOps, Agile, Kanban, and many other great practices.
When we say "full version control stack" we mean it is not just a bare-bones core. Plastic is the repository management code (the server), the GUI tools for Linux, macOS, Windows, command line, diff tools, merge tools, web interface, and cloud server. In short, all the tools you need to manage the versions of your project.
Plastic is designed to handle thousands of branches, automate merges other systems can’t, provide the best diff and merge tools, (we’re the only ones providers of semantic diff and merge). So you can work centralized or distributed (Git-like, or SVN/P4 like), to deal with huge repos (4TB is not an issue) and be as simple as possible.
Plastic is not built on top of Git. It is a full stack so it is compatible with Git but doesn’t share the codebase. It is not a layer on top of Git like GitHub, GitLab, BitBucket, the Microsoft stack, and other alternatives. It is not just a GUI either like GitKraken, Tower and all the other Git GUI options. Instead, we build the entire stack. And, while this is definitely hard, it gives us the know-how and freedom to tune the entire system to achieve things others simply can’t.
Finally, explaining Plastic SCM means introducing the team that built it: we are probably the smallest team in the industry building a full version control stack. We are a compact team of developers with, on average, +8 years of experience building Plastic. It means a low turnover, highly experienced group of people. You can meet us here.
We don’t want to capture users to sell them issue trackers, cloud storage, or build a social network. Plastic is our final goal. It is what makes us tick and breathe. And we put our souls into it to make it better.
Why would someone consider Plastic?
You have other version control options, mainly Git and Perforce.
You can go for bare Git, choose one of the surrounding Git offerings from corporations like Microsoft and Atlassian, or select Perforce. Of course, you can alternatively stick to SVN, CVS, TFS, Mercurial, or ClearCase… but we usually only find users moving away from these systems, not into them anymore.
Why would you choose Plastic instead of the empire of Git or the well-established Perforce (especially since they are in the gaming industry)?
Plastic is a unique software that high-performance teams who want to get the best out of version control use. It’s for teams that need to do things differently than their competitors who have already gone to one of the mainstream alternatives.
What does this mean exactly?
-
Do you want to work distributed like Git but also have teams of team members working centralized? Git can’t solve your issue because it can’t do real centralized, and Perforce is not strong in a distributed environment.
-
Does your team need to handle huge files and projects? This is very common in the gaming industry. Git can’t do big files and projects. Perforce is a good option but it lacks the super-strong branching and merging of Plastic (again, not good at distributed environments).
-
Do you regularly face complex merges? Plastic can handle merge cases out of the scope of Git and Perforce. Besides, we develop the best diff and merge tools you can find, including the ability to even merge code moved across files (semantic diff and merge, our unique technology).
-
Do you need fast Cloud repos located as close to your location as possible? Plastic Cloud lets you choose from a list of more than 12 data centers.
-
Finely-grained security? Plastic is based on access control lists. Git can’t do this by design. Perforce is good at this, but doesn’t reach the access control list level.
-
Performance: Plastic is super-fast, even with repos that break Git or slow down Perforce. Again, a design choice.
-
Excellent support: Our support is part of the product. This is how we see it. Plastic is great, but what really makes it beat our competitors is how we care about users. We answer more than 80% of questions in less than one hour. 95% in under eight hours. And you can talk to real team members, not just a call center, but real product experts who will help you figure out how to work better will help you solve issues, or will simply listen to your suggestions.
-
Responsive release cycles: We release faster than anyone else (several releases a week) to respond to our users' needs.
The list goes on and on, but you get the idea.
Who is using Plastic?
If Git is eating up the world of software development, who is selecting a niche player as Plastic?
Plastic is used by a wide range of teams: Companies with 3000+ developers, small shops with just two programmers starting up the next big game, and the entire range in between. Teams with 20-50 are very common.
What is version control
Version control is the operating system of software development.
We see version control as the cornerstone the rest of the software development sits upon. It takes care of:
-
The project structure and contents that editors, IDEs and compilers will use to build.
-
CI systems that grabs changes, trigger builds and deploy.
-
Issue trackers and project management tools.
-
Code review systems that access the changes to review and collaborate to deliver the software quickly (DevOps).

Version control is much more than a container. It is a collaboration tool. It is what team members will use to deliver each change. Properly used, it can shape the way teams work, enabling faster reviews, careful validation and frequent releases.
Version control is also a historian, the guardian of the library of your project. It contains the entire evolution of the project and can track handy information of why changes happened. This is the key for improvement: those who don’t know their history are condemned to repeat it.
We believe there is an extraordinary value in the project history, and we are only seeing the tip of the iceberg of what’s to come in terms of extracting value from it.
Plastic SCM Editions
Of course, the different editions we offer in Plastic SCM are crystal clear in our minds 😉. But sometimes, explanations are needed. You can find all the detailed info about different editions here.
Here is a quick recap:
| Type | Name | Who it is for |
|---|---|---|
Paid and Free |
Cloud Edition |
Teams who don’t want to host their own Plastic SCM server. They can have local repos and push/pull to the Cloud. Or they can directly checkin/update to the Cloud. You get the storage, the managed cloud server, and all the Plastic SCM software with the subscription. Cloud Edition is dynamically licensed per user. This means if one month nobody in your team uses Plastic, you don’t pay for it, just for the repos stored in the cloud, if any. Cloud Edition is FREE up to a given amount of monthly users and GB of storage. |
Paid |
Enterprise Edition |
Teams who host their own on-premises server. The subscription comes with all the software, server, tools, and several optimizations for high performance, integration with LDAP, proxy servers (the kind of things big teams and corporations need to operate). |
Plastic SCM is licensed per user, not server or machine. This means a developer can use a single license on macOS, Linux, and Windows and pays only one license. It also means you can install as many servers as you need without extra cost.
How to install Plastic
Installing Plastic SCM is straightforward: Navigate go to our downloads page and pick the right installer for your operating system. After that, everything is super easy. If you are on Linux, complete the 2 instructions for your specific distro flavor.
If you are joining an existing project
If you are just joining an existing project, you’ll probably just need the client.
-
Ensure you understand whether you will work centralized (direct checkin) or distributed (local checkin to a local repo, then push/pull).
-
Check the Edition your team is using and ensure you install the right one. If they are using Cloud Edition, you only need that. If they are in Enterprise, ensure you grab the correct binary. It is not much drama to change later, but if you are reading this, you already have the background to choose correctly 🙂
-
If you are using Enterprise and you will work distributed (push/pull), you’ll need to install a local server.
If you are tasked to evaluate Plastic
Congrats! You are the champion of version control of your team now. Well, we’ll help you move forward. Here are a few hints:
-
Check the edition that best suits your needs.
-
You’ll need to install a server. The default installation is fine for production, it comes with our Jet storage which is the fastest. If it is just you evaluating, you can install everything on your laptop, unless you want to run actual performance tests simulating real loads. But, functionality-wise, your laptop will be fine.
-
You’ll need a client, too; GUIs and CLIs come in the same package. Easy!
Detailed installation instructions
Follow the installation and configuration guide to get detailed instructions of how to install Plastic on different platforms.
How to get help
It is important to highlight that you can contact us if you have any questions. Navigate to our page support and select the best channel.
-
It can be an email to support (you can do that during evaluation).
-
Check our forum.
-
Create a ticket in our support system if you prefer.
-
You can also reach us on Twitter @plasticscm.
You should know that we are super responsive! You’ll talk to the actual team and we care a lot about having an extraordinary level of response. Our stats say we answer 80% of the questions in under one hour and more than 95% in under eight hours.
Communication is key for a product like Plastic SCM. We aren’t a huge team hiding our experts behind several layers of first responders. You’ll have the chance to interact with the real experts. And it means not only answering simple questions, but also recommending to teams the best way of working based on their particularities.
By the way, we are always open to suggestions too, 😉
Command line vs. GUI
In many version control books, there are many command-line examples. Look at any book on Git, and you’ll find plenty of them.
Plastic is very visual because we spend lots of effort in the core and in the GUIs. That’s why traditionally most of our docs and blog posts were very GUI-centric.
In this guide, we will try to use the command line whenever it helps to better explain the underlying concepts, and we’ll keep very interface agnostic and concept-focused whenever possible. But, since GUIs are key in Plastic, expect some screenshots, too 🙂
A Plastic SCM primer
Let’s get more familiar with Plastic SCM before covering the recommended key practices about navigating branching, merging, pushing, and pulling.
This chapter aims to get you started with Plastic and learn how to run the most common operations that will help you during the rest of the book.
Get started
I’m going to assume you’ve already installed Plastic SCM on your computer. If you need help installing, I recommend you follow our version control installation guide.
The first thing you need to do is to select a default server and enter the correct credentials to work on it.
If you use the command line, you can run clconfigureclient.
If you use the GUI, the first thing you will see is a screen like this:

If you have to enter the server, decide if you want to connect through SSL and then enter your credentials.
After that, the GUI guides you through creating your first workspace connected to one of the repos on the server you selected.
|
About the GUI
As you saw in the figure above, we’ll be using mockups to represent the GUI elements instead of screenshots of the actual Linux, macOS or Windows GUIs. I prefer to do this for two reasons: first, to abstract this guide from actual GUI changes, and avoid certain users feeling excluded. I mean, if I take screenshots in Windows, then Linux and macOS users will feel like second-class citizens. But on the other hand, if I add macOS screenshots, Windows and Linux users will be uncomfortable. So, I finally decided to show mockups that will help you find your way on your platform of choice. |
Notice that I entered localhost:8087 as the server. Let me explain a little bit about this:
-
The server will typically be "local", for Cloud Edition users, without a port number. This is because every Cloud Edition comes with a built-in local server and a simplified way to access it.
-
If you are evaluating Enterprise Edition and you installed a server locally in your machine,
localhost:8087will default. -
If you are connected to a remote server in your organization, your server will be something like
skull.codicefactory.com:9095, which is the one we use. -
If you connect directly to a Plastic Cloud server, it will be something like
robotmaker@cloud, whererobotmakerwill be the name of your cloud organization instead.
3 key GUI elements
Before moving forward, I’d like to highlight the three most essential elements you will use in the GUIs.
-
Workspace Explorer (previously known as "items view").
-
Pending Changes, a.k.a. Checkin Changes.
-
Branch Explorer.
Workspace Explorer
This view is like a Windows Explorer or macOS Finder with version control information columns.

You can see the files you have loaded into your workspace and the date when they were written to disk, and also the changeset and branch where they were created (although I’m not including these last two in the figure above).
It is the equivalent of running a cm ls command.
cm ls
0 12/28/2018 14:49 dir br:/main .
0 11/29/2018 14:49 dir br:/main art
0 12/10/2018 18:23 dir br:/main codeThe most exciting things about the Workspace Explorer are:
-
It comes with a finder that lets you locate files quickly by name patterns. CTRL-F on Windows or Command-F on macOS.
-
There is a context menu on every file and directory to trigger specific actions:

Actions are enabled depending on the context (for example, you can’t check the history of a private file).
Pending Changes
This view is so useful! You can perform most of your daily operations from here. In fact, I strongly recommend using this view and not the Workspace Explorer to add files and check in changes.
The layout of Pending Changes in all our GUIs looks like this:

-
There are important buttons at the top to refresh and find changes (although you can also configure all GUIs to do auto-refresh), checkin and undo changes.
-
Then, there is a section to enter checkin comments. This is the single most important thing to care about when you are in this view: ensure the comment is relevant. More about checkin comments later in the chapter about task branches.
-
And finally, the list of changes. As you can see, Pending Changes split the changes in "changed", "deleted", "moved," and "added". Much more about these options in the "Finding changes" section in the "Workspaces" chapter.
The other key thing about Pending Changes is the ability to display the diffs of a selected file:

Plastic comes with its own built-in diff tool. And as you can see, it can do amazing things like tracking methods that were moved. We are very proud of our SemanticMerge technology.
Most of the Plastic SCM actions you will do while developing are done from Pending Changes. You simply switch to Plastic, see the changes, check in, and get back to work!
Branch Explorer
The Branch Explorer diagram is our crown jewel. We are super proud of it and the way it can render the evolution of the repos. The Branch Explorer (a.k.a. BrEx) view has the following layout:

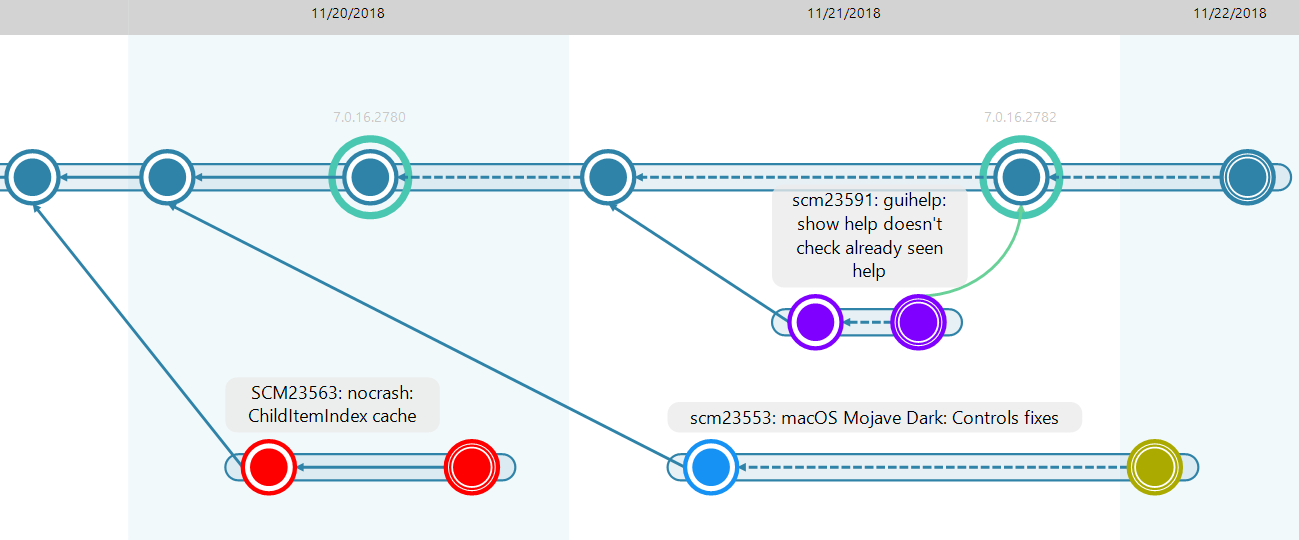
Every circle in the graphic is a changeset. The changesets are inside containers that represent the branches. The diagram evolves from left to right, where changesets on the right are newer than those on the left. The actual Branch Explorer in the GUIs draws columns with dates to clarify this.
The green arrows are merges and the blue ones connect changesets with a "is the parent of" relationship.
The green donuts surrounding changesets are labels (equivalent to Git tags).
The Branch Explorer lets you filter the date from where you want to render the repo, and it has zoom, a search box, and also an action button to show "only relevant" changesets. It also shows a "house icon" in the changeset your workspace is currently on (this is true for regular Plastic, not Gluon, as you will see in the "Partial Workspaces" section).
By the way, if you click "Only relevant", the Branch Explorer will compact as the following figure shows, since the "relevant changesets" are:
-
Beginning of a branch.
-
End of a branch.
-
Labeled changeset.
-
Source of a merge.
-
Destination of a merge.
This way, it is very easy to make large diagrams more compact by hiding "non-relevant" changesets.

From the Branch Explorer context menus, you can perform several key actions. You can select every branch, changeset, label and right-click on it to discover their actions.
Typical actions you can perform are:
-
Switch your workspace to a different branch, changeset, or label.
-
Diff branches, changesets, and labels.
-
Push and pull branches.
-
Merge branches and changesets.
-
Actions to set attributes to branches.
There are other views but…
In my opinion, you can perform all the daily actions just using Pending Changes and the Branch Explorer, and maybe a little bit of the Workspace Explorer. If I had to remove everything except what was absolutely essential, Plastic would run just with these three.
There are other views like the Branches View, which lists branches more traditionally (a list), Changesets View, Attributes, Labels… but you can use the Branch Explorer instead for a more visual view.
Listing repos on different servers
In the command line, run:
cm repository listIn my case, this is the output of the command:
cm repository list
quake@192.168.221.1:6060
quake_replicated@192.168.221.1:6060
quake_from_git@192.168.221.1:6060
ConsoleToast@192.168.221.1:6060
PlasticNotifier@192.168.221.1:6060
asyncexample@192.168.221.1:6060
geolocatedcheckin@192.168.221.1:6060
p2pcopy@192.168.221.1:6060
udt@192.168.221.1:6060
wifidirect@192.168.221.1:6060
PeerFinder@192.168.221.1:6060The repository [list | ls] command shows the list of the repos on your default server (the one you connected to initially).
But, it also works if you list the reps of another server:
>cm repository list skull:9095
Enter credentials to connect to server [skull:9095]
User: pablo
Password: *******
codice@skull:9095
pnunit@skull:9095
nervathirdparty@skull:9095
marketing@skull:9095
tts@skull:9095I used the command to connect to skull:9095 (our main internal server at the time of this writing, a Linux machine) and Plastic asked me for credentials. The output I pasted is greatly simplified since we have a list of over 40 repos on that server.
You can also use repository list to list your cloud repos. In my case:
>cm repository list codice@cloud
codice@codice@cloud
nervathirdparty@codice@cloud
pnunit@codice@cloud
marketing@codice@cloud
plasticscm.com@codice@cloud
devops@codice@cloud
installers@codice@cloudThis is again a simplified list. This time the command didn’t request credentials since I have a profile for the codice@cloud server.
You get the point; every server has repos, and you can list them if you have the permissions.
For you most likely, a cm repository list will show something like:
cm repository list
default@localhost:8087By default, every Plastic installation creates a repo named default so you can start doing tests with it instead of starting from a repo-less situation.
From the GUIs, there are "repository views" where you can list the available repos:

There is always a way to enter a different server that you want to explore and also a button to create new repos if needed.
Create a repo
Creating a new repository is very simple:
cm repository create myrepo@localhost:8087Where myrepo@localhost:8087 is a "repo spec" as we call it.
Using the GUI is straightforward, so I won’t show a screenshot; it is just a dialog where you can type a name for the repo 🙂.
Of course, you can only create repositories if you have the mkrep permission granted on the server.
Create a workspace
A workspace is a directory on a disk that you will use to connect to a repository. Let’s start with a clean workspace.
If you run:
cm workspace create demowk c:\users\pablo\wkspaces\demowkPlastic will create a new workspace named demowk inside the path you specified.
It is very typical to do this instead:
cd wkspaces
mkdir demowk
cd demowk
cm workspace create demowk .Notice I didn’t specify which repository to use for the workspace. By default, the first repo in the default server is used, so in your case it will most likely be your default repo. There are two alternatives to configure the repo:
cm workspace create demowk . --repository=quake@localhost:9097Or, simply create it in the default location and then switch to a different repo:
cm workspace create demowk .
cm switch main@quakeWorkspaces have a name and a path for easier identification. And, you can list your existing workspaces with cm workspace list.
>cm workspace list
four@MODOK c:\Users\pablo\wkspaces\dev\four
five@MODOK c:\Users\pablo\wkspaces\dev\five
tts@MODOK c:\Users\pablo\wkspaces\dev\tts
plasticscm-com@MODOK c:\Users\pablo\wkspaces\dev\plasticscm-com
doc-cloud@MODOK c:\Users\pablo\wkspaces\dev\doc-cloud
plasticdocu_cloud@MODOK c:\Users\pablo\wkspaces\dev\plasticdocu_cloud
mkt_cloud@MODOK c:\Users\pablo\wkspaces\mkt-sales\mkt_cloud
udtholepunch@MODOK c:\Users\pablo\wkspaces\experiments\udtholepunchThe previous figure is a subset of my local workspaces at my modok laptop 🙂.
From the GUI, there’s always a view to list and create workspaces:

As you see, there can be many workspaces on your machine, and they can be pointing to different repos both locally and on distant servers. Plastic is very flexible in that sense as you will see in "Centralized & Distributed."
Creating a workspace from the GUI is straightforward, as the following figure shows:

Suppose you create a workspace to work with an existing repo. Just after creating the workspace, your Branch Explorer places the home icon in changeset zero. Initially, workspaces are empty until you run a cm update (or GUI equivalent) to download the contents. That’s why initially, they point to changeset zero.
Adding files
Let’s assume you just created your workspace demowk pointing to the empty default repo on your server. Now, you can add a few files to the workspace:
echo foo > foo.c
echo bar > bar.cThen, check the status of your workspace with cm status as follows:
>cm status
/main@default@localhost:8087 (cs:0 - head)
Added
Status Size Last Modified Path
Private 3 bytes 1 minutes ago bar.c
Private 3 bytes 1 minutes ago foo.cThe GUI equivalent will be:

You can easily check in the files from the GUI by selecting them and clicking checkin.
From the command line, you can also do this:
cm add foo.cWhich will display the following status:
>cm status
/main@default@localhost:8087 (cs:0 - head)
Added
Status Size Last Modified Path
Private 3 bytes 3 minutes ago bar.c
Added 3 bytes 3 minutes ago foo.cNote how foo.c is now marked as "added" instead of simply "private" because you already told Plastic to track it, although it wasn’t yet checked in.
If you run cm status with the --added flag:
>cm status --added
/main@default@localhost:8087 (cs:0 - head)
Added
Status Size Last Modified Path
Added 3 bytes 5 minutes ago foo.cfoo.c is still there while bar.c is not displayed.
Ignoring private files with ignore.conf
There will be many private files in the workspace that you won’t need to check in (temporary files, intermediate build files (the .obj), etc). Instead of seeing them repeatedly in the GUI or cm status, you can hide them by adding them to ignore.conf. Learn more about ignore.conf in "Private files and ignore.conf."
Initial checkin
If you run cm ci from the command line now, only foo.c will be checked in unless you use the --private modifier or run cm add for bar.c first. Let’s suppose we simply checkin foo.c:
>cm ci -c "Added foo.c"
The selected items are about to be checked in. Please wait ...
| Checkin finished 33 bytes/33 bytes [##################################] 100 %
Modified c:\Users\pablo\wkspaces\demowk
Added c:\Users\pablo\wkspaces\demowk\foo.c
Created changeset cs:1@br:/main@default@localhost:8087 (mount:'/')Notice how I added a comment for the checkin with the -c modifier. This is the comment that you will see in the Branch Explorer (and changeset list) associated with the changeset 1 you just created.
Checkin changes
Let’s now make some changes to our recently added foo.c. Then run cm status:
>cm status
/main@default@localhost:8087 (cs:1 - head)
Changed
Status Size Last Modified Path
Changed 1024 bytes 1 minutes ago foo.c
Added
Status Size Last Modified Path
Private 1024 bytes 5 minutes ago bar.cAs you can see, foo.c is detected as changed, and the old bar.c is still detected as ready to be added (private).
From the GUI, the situation is as follows:

And, you’ll be able to easily select files, diff them, and check in.
Undoing changes
Suppose you want to undo the change done to foo.c.
From the GUI, it will be as simple as selecting foo.c and clicking "Undo."
Important: Only the checked elements are undone.
From the command line:
>cm undo foo.c
c:\Users\pablo\wkspaces\demowk\foo.c unchecked out correctly
>cm status
/main@default@localhost:8087 (cs:1 - head)
Added
Status Size Last Modified Path
Private 1024 bytes 6 minutes ago bar.cCreate a branch
Now, you already know how to add files to the repo and check in, so the next thing is to create a branch:
cm branch main/task2001Creates a new branch child of the main branch, and at this point, it will be a child of changeset 1.
There is a --changeset modifier to specify the starting point of your new branch.
Now your Branch Explorer will be as follows:

Your workspace is still on the main branch because you haven’t switched to the new branch.
So let’s switch to the new branch this way:
> cm switch main/task2001
Performing switch operation...
Searching for changed items in the workspace...
Setting the new selector...
Plastic is updating your workspace. Wait a moment, please...
The workspace c:\Users\pablo\wkspaces\demowk is up-to-date (cset:1@default@localhost:8087)And now the Branch Explorer looks like:

The home icon located in the new main/task2001 branch that is still empty.
Let’s modify foo.c in the branch by making a change:
>echo changechangechange > foo.c
>cm status
/main/task2001@default@localhost:8087 (cs:1 - head)
Changed
Status Size Last Modified Path
Changed 21 bytes 8 seconds ago foo.c
Added
Status Size Last Modified Path
Private 1024 bytes 6 minutes ago bar.cAnd then a checkin:
>cm ci foo.c -c "change to foo.c" --all
The selected items are about to be checked in. Please wait ...
| Checkin finished 21 bytes/21 bytes [##################################] 100 %
Modified c:\Users\pablo\wkspaces\demowk\foo.c
Created changeset cs:2@br:/main/task2001@default@localhost:8087 (mount:'/')The Branch Explorer will reflect the new changeset:

From the GUI, it is straightforward to create new branches and switch to them:

The Branch Explorer provides context menus to create new branches from changesets and branches and switch to them. (I’m highlighting the interesting options only, although the context menus have many other interesting options to merge, diff, etc.).
The dialog to create branches in the GUIs (Linux, macOS, and Windows) looks like this:

Here you can type the branch name and an optional comment. Branches can have comments in Plastic, which is very useful because these comments can give extra info about the branch and be rendered in the Branch Explorer.
As you see, there is a checkbox to switch the workspace to the branch immediately after creation.
If you look carefully, you’ll find two main options to create branches: manual and from the task. The image above shows the manual option. Let’s see what the "from task" is all about.

You can connect Plastic to a variety of issue trackers, and one of the advantages is that you can list your assigned tasks and create a branch directly from them with a single click. Learn more about how to integrate with issue trackers by reading the Issue Trackers Guide.
Diffing changesets and branches
The next key tool to master in Plastic is the diff. You’ll probably spend more time diffing and reviewing changes than actually making checkins.
Diffing from the command line
You would use the cm diff command to diff your first changeset:
>cm diff cs:1
A "foo.c"In the above figure, in changeset 1, foo.c is added.
Now, if you diff changeset 2:
>cm diff cs:2
C "foo.c"The command shows that foo.c is modified on that changeset.
The cm diff command is responsible for diffing both changesets/branches and actual files.
Since the changes made were pretty basic so far, the diffs will be very simple. So let me show you a diff from a branch I have on one of my local repos:
>cm diff br:main/scm23606
C "art\me\me.jpg"
C "art\ironman\IronMan.jpg"
C "code\plasticdrive\FileSystem.cs"
M "code\cgame\FileSystem.cs" "code\plasticdrive\FileSystem.cs"As you can see, the diff is more complex this time, and it shows how I changed three files and moved one of them in the branch main/scm23606.
So far, we only diffed changesets and branches, but it is possible to diff files too. So, I’m going to print the revision ids of the files changed in scm23606 to diff the contents of the files:
>cm diff br:main/scm23606 --format="\{status} \{path} \{baserevid} \{revid}"
C "art\me\me.jpg" 28247 28257
C "art\ironman\IronMan.jpg" 27600 28300
C "code\plasticdrive\FileSystem.cs" 28216 28292
M "code\plasticdrive\FileSystem.cs" -1 28292Then, I can diff the change made in FileSystem.cs as follows:
>cm diff revid:28216 revid:28292Instead of a text diff printed on your console, cm diff launches the diff tool configured for text files. Plastic comes with a built-in diff and merge tool we call Xdiff/Xmerge, and then a GUI like the following displays:
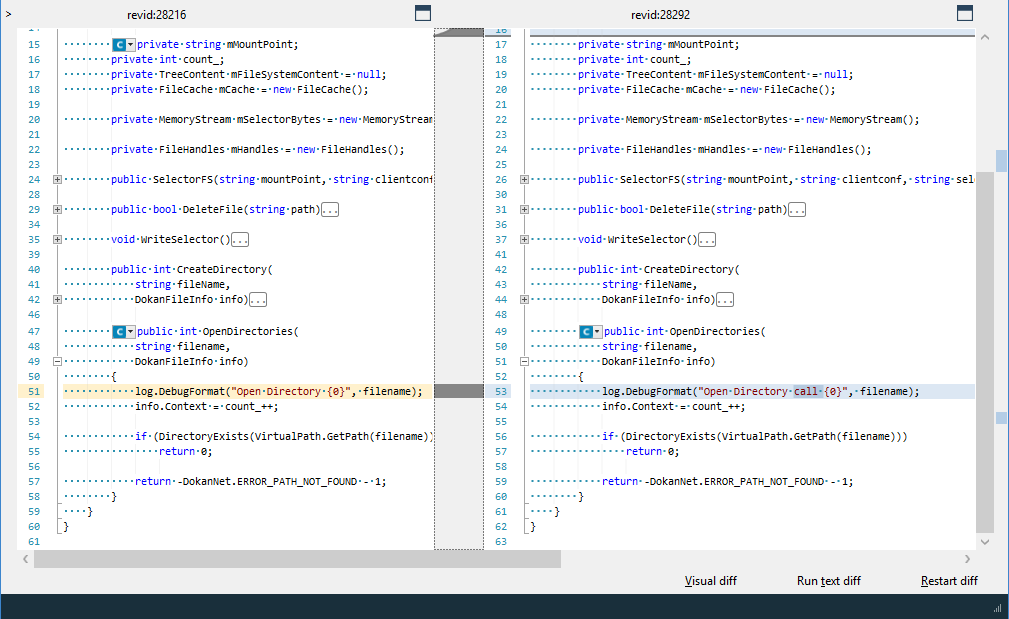
We think GUIs are better tools to show diffs than the typical unified diff displayed by many tools, and that’s why we launch a GUI even when the diff is requested from the command line.
If you really want to see a unified diff printed on the console (because you need to run the diff from a terminal without GUI support, for instance), check our Unix diff from console documentation.
Explore the cm diff help to find all the available options. For example, you can diff branches, individual files, changesets, labels (equivalent to diffing the changeset), or any pair of changesets that you want to compare changes.
>cm diff helpDiffing from the GUIs
Well, it is no secret that we put much more attention into GUIs than the command line when it comes to diffing. This is because we think that 99% of the time, developers will diff using a Plastic GUI instead of the command line.
Diffing changesets and branches is very simple from the Branch Explorer; look at the following figure, where you’ll see how there are diff options in the context menus of branches and changesets (and labels).

Diffing an entire branch is simple. Right-click on it to select it (you’ll see that it changes color) and then select the "diff branch" option.
As the following figure shows, diffing a branch is the equivalent of diffing its head changeset and its parent changeset.

The figure shows how diffing branch task1209 is equivalent to diffing changesets 13 and 23.
You can see the selected changesets are colored in violet; when you multi-select changesets, they are colored differently to highlight the fact that many csets are selected. And, you can right-click and run "diff selected."
The diffs of changesets and branches in the GUI are very powerful GUIs like the following mockup shows:

The changeset/branch diff window first summarizes the changes on a tree with changed, deleted, added, and moved, and then shows the actual side-by-side diff of the selected file.
One of the great advantages of the built-in diff in Plastic is that it can to do semantic diffs. This means that the diff can track moving code fragments for certain languages like C#, C++, C, and Java (and then several community-contributed parsers). For example, in the figure above, you can see how the CreateDirectory method was identified as moved to a different location.
Learn more about what "semantic version control" can do.
Merge a branch
Let’s rewind to where we left our straightforward example where we created branch task2001 and made a checkin on it. What if we now want to merge it back to the main branch?
Merging is effortless; you switch your workspace to the destination branch and merge from the source branch or changeset. This is the most typical merge. There is another option, "merge to," which doesn’t require a workspace to run it, but we’ll start with the most common one.
Merging from the GUI
This is what our branch explorer looks like at this point with the main branch and task2001. If you remember, the workspace was in task2001, so the first thing we’ll do is switch to the main branch, by selecting the branch, right-clicking on it, and running the "Switch workspace to this branch" action.

Once the switch is complete, the Branch Explorer will look as follows, and we’ll right-click on task2001 to run a "merge from this branch":

The GUI will guide us through the merge process. In this case, there’s no possible conflict since there are no new changesets on the main branch that could conflict with task2001, so all we have to do is checkin the result of the merge. In the Pending Changes view, you’ll see a "merge link" together with the modified foo.c. Something like this:

See "Plastic merge terminology" in the merge chapter to learn what "replaced" means and also the other possible statuses during the merge.
Now, once the checkin is done, the Branch Explorer will reflect that the branch was correctly merged to main as follows:

We performed the entire merge operation from the Branch Explorer, but you can also achieve the same from the Branches view (list of branches) if you prefer.
Merging from the command line
By the way, it is also possible to merge from the command line. I will repeat the same steps explained for the GUI, but this time, running commands.
First, let’s switch back to the main branch:
>cm switch main
Performing switch operation...
Searching for changed items in the workspace...
Setting the new selector...
Plastic is updating your workspace. Wait a moment, please...
Downloading file c:\Users\pablo\wkspaces\demowk\foo.c (8 bytes) from default@localhost:8087
Downloaded c:\Users\pablo\wkspaces\demowk\foo.c from default@localhost:8087And now, let’s run the merge command:
>cm merge main/task2001
The file /foo.c#cs:2 was modified on source and will replace the destination versionThe cm merge command simply does a "dry run" and explains the potential merge conflicts.
To actually perform the merge we rerun with the --merge flag:
> cm merge main/task2001 --merge
The file /foo.c#cs:2 was modified on source and will replace the destination version
Merging c:\Users\pablo\wkspaces\demwk\foo.c
The revision c:\Users\pablo\wkspaces\demowk\foo.c@cs:2 has been loadedLet’s check the status at this point:
>cm status
/main@default@localhost:8087 (cs:1 - head)
Pending merge links
Merge from cs:2 at /main/task2001@default@localhost:8087
Changed
Status Size Last Modified Path
Replaced (Merge from 2) 21 bytes 14 seconds ago foo.c
Added
Status Size Last Modified Path
Private 6 bytes 7 minutes ago bar.cAs you can see, it says foo.c has been "replaced," same as the GUI did.
A checkin will confirm the merge:
>cm ci -c "merged from task2001"
The selected items are about to be checked in. Please wait ...
\ Checkin finished 0 bytes/0 bytes [##################################] 100 %
Modified c:\Users\pablo\wkspaces\demowk
Replaced c:\Users\pablo\wkspaces\demowk\foo.c
Created changeset cs:3@br:/main@default@localhost:8087 (mount:'/')And this way, we completed an entire branch merge from the command line 🙂.
Learn more
This was just an intro to show you how to perform a basic merge, but there is an entire chapter in this guide about the merge operation where you’ll learn all the details required to become an expert.
Annotate/blame a file
Annotate, also known as blame, tells you where each line of a file comes from. It is extremely useful to locate when a given change was made.
Consider the following scenario where a file foo.cs was modified in each changeset:

And now consider the following changes made to the file in each changeset:

I marked in green changes made in each of the revisions compared to the previous one and specified the author of each change at the top of the file.
The annotate/blame of the file in revision 16 will be as follows:

Take some time to scrutinize the example until you really understand how it works. Annotate takes the contents of the file in the changeset 16, then walk back the branch diagram diffing the file until the origin of each line is found.
In our case, it is clear that lines 10, 20, 40, 80, and 90 come from the changeset 12 where the file was initially added.
Then line 30, where Borja changed the return type of the Main function from void to int, belongs to changeset 13.
Line 50 is where Pablo changed Print("Hello"); by Print("Bye"), and it is attributed to changeset 15.
Then line 60 is marked in red because it was modified during a merge conflict; changeset 14 in main/task2001 modified the line differently than changeset 15 in main, so Jes??s had to solve the merge conflict and decided to modify the loop, so it finally goes from 1 to 16.
Finally, line 70 comes from changeset 14 in task2001 where Miguel modified the line to be Print(i+1);
Since Plastic always keeps branches (see "We don’t delete task branches") annotate tells you the task where a given change was introduced, which is great help to link to the right Jira or any issue tracker you might use.
Please note that the GUI will use a gradient to differentiate the most recent changes from the older ones.
Annotate/blame from command line and GUI
Annotating a file is easy from the GUI; Navigate to the Workspace Explorer, locate the file, right-click and select "annotate."
From the command line, run:
> cm annotate foo.cYou annotate a given revision of a file
You don’t annotate a file but a given revision of a file. For example, in the previous example, annotating the file in changeset 16 is not the same as changeset 14 or 15.
For example, if you annotate changeset 12, all the lines will be attributed to changeset 12 since this was where the file was added. If you annotate 13, all lines will belong to 12 except line 30 marked as created in 13.
If a line is modified several times, the line closer to the destination changeset will be marked as "creator" of the line.
Push and pull
Unless you’ve been living under a rock, you’ve heard of distributed version control (DVCS), and you know that the two key operations are push and pull.
I’m not going to explain what they mean in detail since we have a chapter dedicated to distributed operation, but I’ll just introduce the basics.
Suppose you create a new repository and want to clone the main branch created in the default repo to the new repository.
> cm repository create cloned@localhost:8087
> cm push main@default@localhost:8087 cloned@localhost:8087The cm push command pushes the main@default branch to the "cloned" repo.
Imagine that, later, some new changes are created in main@cloned, and you want to pull them to main@default.
> cm pull main@cloned@localhost:8087 defaultI used a couple of repos on my localhost server, but the following would be possible:
> cm push main@default@localhost:8087 default@codice@cloud
> cm push main@default@localhost:8087 newrepo@skull.codicefactory.com:9095Provided that the destination repos default@codice@cloud and newrepo@skull.codicefactory.com:9095 were previously created.
Pushing and pulling from the GUI is even easier since there are options to do that from every branch context menu in the Branch Explorer view and Branches view.
Finally, the GUI comes with a sync view to let you synchronize many branches in bulk. It is worthwhile to learn how the sync view works by reading the GUI reference guide.
Learn more
-
Master the most frequent command line actions by reading the command line guide.
Keep reading this guide to learn more details about Plastic SCM 🙂.
One task - one branch
Before we jump into how to do things in Plastic, I will describe in detail the work strategy we recommend to most teams. Once that is clear, finding your way through Plastic will be straightforward.
As we saw in the section "A perfect workflow", task branches are all about moving high-quality work quickly into production.

Each task will go through a strict process of code development, code review and testing before being safely deployed to production.
This chapter covers how to implement a successful branch per task strategy, including all the techniques and tactics we learned over the years.
Branch per task pattern
We call it task branches, but the actual branch per task strategy has been around for +20 years.
There are many different branching patterns but, over the years, we concluded task branches are really the way to go for 95% of the scenarios and teams out there.
The pattern is super simple; you create a new branch to work on for each new task in your issue tracker.
The following is a typical diagram (it perfectly fits with the Branch Explorer visualization in Plastic) of a branch per task pattern:

task1213 is already finished and merged back to main, task1209 is longer and still ongoing (and it has many changesets on it), and task1221 was just created, and the developer only performed a single checkin on it.
Branch naming convention
We like to stick to the following pattern: prefix + task number. That’s why the branches in the example above were named task1213, task1209, and task1221. "task" is the prefix and the number represents the actual task number in the associated issue tracker.
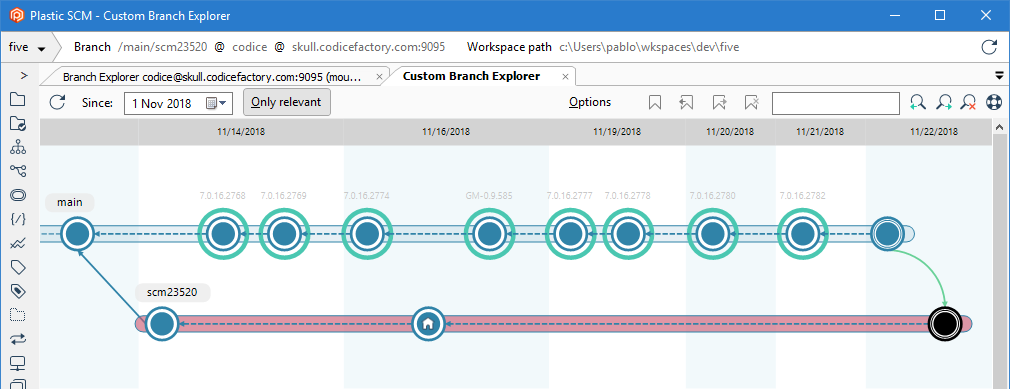
The following is an example from our repo:
You can see how we use the prefix "SCM" and then the task number. In our case, we use SCM because we build a source code management system 🙂. You see how some team members prefer SCM in uppercase, and others use lowercase… well; I believe it is just a matter of self-expression.
|
We also use the prefixes to link with the issue tracker, for example, with Jira. |
The screenshot also shows a description for each branch together with the number. This is because the Branch Explorer retrieves it from the issue tracker. You can also see the branch description by selecting "display branch task info".
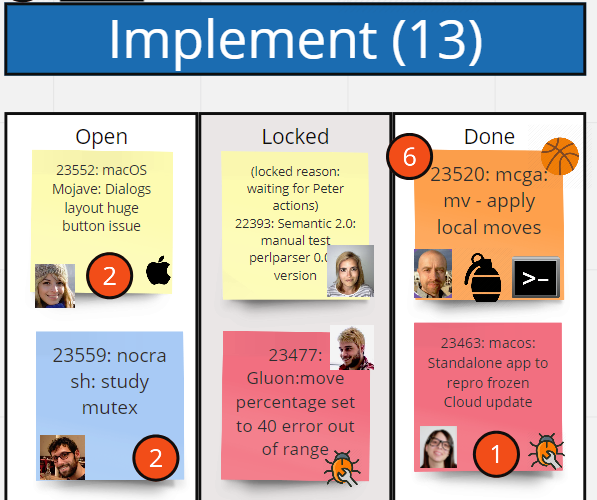
We see some teams using long branch names, which describes the task. Is that wrong? Not really, but we truly prefer to direct the conversation based on univocal numbers. In fact, see what our Kanban board looks like on any day: the entire discussion is always about tasks, and there’s no doubt where the associated code is.
Task branches are short
Remember the Scrum rule that says tasks shouldn’t be longer than 16 hours to ensure they are not delayed forever and keep the project under control? Well, we love that.
At the time of writing, we had just switched to Kanban for a couple of months after almost 300 sprints of two weeks each. We changed to Kanban to reduce task cycle times, but we like many practices of Scrum. And keeping tasks short is one of them.
Task branches must be closed quickly. It is great to have many small tasks you can close in just a few hours each. It is good to keep the project rhythm, to keep the wheels spinning, and never stop deploying new things. A task that spans for a week stops the cycle.
"But some tasks are long" – I hear you cry. Sure, they are. Splitting bigger tasks into smaller ones is an art and science in itself. You need to master it to get the best out of task branches and a solid overall continuous delivery cycle.
There are a few red flags to keep in mind:
-
Don’t create "machete cut" tasks. You ask someone to cut a task into smaller pieces, and then they create a pile of smaller ones that don’t make any sense in isolation and can’t be deployed independently. No, that’s not what we are looking for. Of course, creating shorter tasks from a bigger one can be daunting at times, but nothing you can’t solve throwing a little bit of brainpower to it.
-
Every team member needs to buy it. It is not just about "let’s make all tasks consistently shorter"; it is about understanding life is easier if you can close and deliver a small piece of a larger task today instead of struggling with it for a few days before delivering anything. It is all about openly communicating progress, avoiding silos, and removing "I’m at 80% of this" day after day. Predictability, responding to the problem quickly, and agile philosophy is under the "short branches" motto.
Task branches are not feature branches
I admit sometimes, I wrongly use both terms interchangeably. Feature branches got viral thanks to Git Flow in the early Git explosion days. Everyone seemed to know what a feature branch was, so sometimes I used it as a synonym for task branches. They are not.
A feature can be much longer than a task. It can take many days, weeks, or months to finish a feature. And it is definitely not a good idea to keep working on a branch for that long unless you want to end up with a big-bang integration.
I’m not talking just about merge problems (most of our reality here at Plastic is about making impossible merges easy to solve, so that’s not the problem), but about project problems. Delay a merge for a month, and you’ll spend tons of unexpected time making it work together with the rest of the code, and solving merge problems will be the least of your problems.
Believe me, continuous integration, task branches, shorter release cycles were all created to avoid big bangs, so don’t fall into that trap.
To implement a feature, you will create many different task branches, each of them will be merged back as soon as it is finished, and one day, the overall feature will be complete. And, before you ask: use feature toggles if the work is not yet ready to be public, but don’t delay integrations.
Keep task branches independent
Here is the other skill to master after keep task branches short: keep task branches independent.
Here is a typical situation:

You just finished task1213 and have to continue working on the project, so the obvious thing to do is simply continue where you left it, right?
Wrong.
This happens very often to new users. They just switched from doing checkins to trunk continuously and feel the urge to use their previous code, and even a bit of vertigo (merge-paranoia) if they don’t.
You have to ask yourself (or your teammates) twice: do you really need the code you just finished in task1213 to start task1209? Really? Really?
Quite often, the answer will be no. Believe me. Tasks tend to be much more independent than you first think. Yes, maybe they are exactly on the same topic, but you don’t need to touch exactly the same code. You can simply add something new and trust the merge will do its job.
There is a scenario where all this is clearer and more dangerous: suppose that 1213 and 1209 are bug fixes instead of tasks. You don’t want one to depend on the other. You want them to hit main and be released as quickly as possible; even if they touch the same code, they are different fixes. Keep them independent!
And now you also get the point of why keeping tasks independent matters so much. Look at the following diagram:

task1209 was merged before task1213. Why is this a problem? Well, suppose each task goes through a review and validation process:
-
task1209was reviewed and validated, so the CI system takes it and merges it. -
But,
task1213is still waiting. It wasn’t reviewed yet… but it reached main indirectly through1209.
See the problem?
You’re probably thinking: yes, but all you have to do is tell the team that 1209 doesn’t have to be merged before 1213 is ready.
I hear you. And it worked moderately well in the times of manual integration, but with CI systems automating the process now, you are just creating trouble. Now, you have to manually mark the task somehow so that it is not eligible for merge (with our mergebots and CI integrations, it would be just setting an attribute to the branch). You are just introducing complexity and slowing the entire process down. Modern software development is all about creating a continuous flow of high-quality changes. These exceptions don’t help.
What if you really need tasks to depend on each other
There will be cases where dependencies will be required. Ask yourself three times before taking the dependency for granted.
If tasks need to depend on each other, you need to control the order in which they’ll be integrated. If you are triggering the merges manually (discouraged),ensure there is a note for the build-master or integrator in charge.
If you have an automatic process in place, you’ll need to mark branches somehow so they are not eligible for merge by the CI system or the mergebot.
Techniques to keep branches independent
|
This is a pretty advanced topic, so if you are just finding your way through Plastic, it is better to come back to it when you have mastered the basics. |
There will be other cases where you’ll be able to keep tasks independent with a bit of effort.
Very often, when you need to depend on a previous task, you need just some of the changes done there.
Use cherry pick carefully to keep branch independent:
If that’s the case, and provided you were careful enough to isolate those changes in an isolated changeset (more on that in the "Checkin often and keep reviewers in mind" section), you can do a cherry pick merge (as I explain in the "Cherry picking" section).

A cherry pick will only bring the changes made in changeset 13, not the entire branch. The branches will continue being primarily independent and much safer to merge independently than before.
Of course, this means you must be careful with checkins, but that’s something we also strongly encourage.
Add a file twice to keep tasks independent:
There is a second technique that can help when you add a new file on task1213 and you really need this file in the next task. For example, it can be some code you really need to use. This is a little bit contrived, but it works: Add the file again in task1209. Of course, this only works when you just need something small. If you need everything, copying is definitely not an option.
Now, you probably think I’m crazy: Copy a file manually and checkin again? Isn’t it the original sin that version control solves?
Remember, I’m trying to give you choices to keep tasks independent, which is desirable. And yes, this time, this technique can help.
You’ll be creating a merge conflict for the second branch (an evil twin as we call it) that you’ll need to solve, but tasks will stay independent.
The sequence will be as follows: task1209 will merge without conflict.

Then, when task1213 tries to merge, a conflict is raised:

If you are doing manual merges to the main branch, all you have to do is solve the conflict and checkin the result. So it won’t be that hard.
But, if you are using a CI system or a mergebot in charge of doing the merges, there won’t be a chance to make manual conflict resolution there, so the task will be rejected.
If that happens, you’ll have to follow what we call a rebase cycle: simply merge down from main to task1213 to solve the problem, and then the branch will merge up without conflicts.

|
Note for Git users
Git rebase is very different from what we call rebase in Plastic. Rebase in Plastic is simply "merge down" or "changing the base." For example, branch |
Checkin often and keep reviewers in mind
Ever heard this? Programs must be written for people to read and only incidentally for machines to execute. It is from the legendary book "Structure and Interpretation of Computer Programs (MIT)."
It is a game-changer. We should write code thinking about people, not computers. That’s the cornerstone of readable code, the key to simple design. It is one of the cornerstones of agile, extreme programming, and other techniques that put code in the center of the picture.
Well, what if you also checkin for people to read? Yes, it might not be easy at first, but it really pays off.
Let’s start with a few anti-patterns that will allow me to explain my point here.
Antipattern 1: Checkin only once
Imagine that you have to do an important bug fix or add a new feature, but you need to clean up some code before that.
This is one way to do it:

Then the reviewer comes, diffs the changeset number 145, finds there are 100 modified files, and… goes for a coffee or lunch, or wants to leave for the day… ouch!
And this is how the traditional way to diff branches provokes context switches, productivity loss, or simply "ok, whatever, let’s approve it."
Antipattern 2: Checkin for yourself
Let’s try again with a different checkin approach:

This time the developer checked in several times during development. It is beneficial for him because he protected his changes to avoid losing them in the event of a weird crash or something. Multiple checkins can also help when you are debugging or doing performance testing. Instead of commenting code out and going back and going crazy, you create real "checkpoints" you know you can go back later safely if you get lost in the way.
But the reviewer will go and simply diff the entire branch because the individual checkins won’t be relevant for him. And the result will be as demotivating as it was in the previous case: 100+ files to review. Ouch!
Checkin for the reviewer
Now, let’s follow the rule we all use: checkin with the reviewer in mind. Every checkin has to help the reviewer follow your train of thought, follow your steps to understand how you tackled the task.
Let’s try again:

Now, as a reviewer, you won’t go and diff the entire branch. Instead, you’ll diff changeset by changeset. And, you’ll be following the pre-recorded explanation the author made to clarify each step of the task. You won’t have to find yourself against a bold list of 100+ modified files. Instead, you’ll go step by step.
First, you see 21 files modified, but the comment says it was just about cleaning up some C# usings. The list of 21 files is not terrifying anymore; it is just about removing some easy stuff. You can quickly glance through the files or even skip some of them.
Then, the next 12 files are just about a method extracted to a new class, and the affected callers having to adapt to the new call format. Not an issue either.
Next comes 51 files, but the comment clearly says it is just because a method was renamed. Your colleague is telling you it is a trivial change, probably done thanks to the IDE refactoring capabilities in just a few seconds.
Then, it comes the actual change, the difficult one. Fortunately, it only affects 2 files. You can still spend quite a lot of time on this, really understanding why the change was done and how it works now. But it is just two files. Nothing to do with the setback produced by the initial vision of 100 files changed.
Finally, the last change is a method that has been removed because it is no longer invoked.
Easier, isn’t it?
Objection: But… you need to be very careful with checkins, that’s a lot of work!
Yes, I hear you. Isn’t it a lot of work to write readable code? Isn’t it easier and faster to just put things together and never look back? It is not, right? The extra work of writing clean code pays off in the mid-term when someone has to touch and modify it. It pays off even if the "other person touching the code" is your future self coming back just three months later.
Well, the same applies to carefully crafted checkins. Sure, they are more complex than "checkpoint" checkins, but they really (really!) pay off.
And, the best thing is that you get used to working this way. Same as writing readable code becomes a part of your way of working once you get used to it, doing checkins with reviewers in mind just becomes natural.
And, since development is a team sport, you’ll benefit from others doing that too, so everything flows nicely.
Task branches turn plans into solid artifacts that developers can touch
This is where everything comes together. As you can see, branches don’t live in isolation. They are not just version control artifacts that live on a different dimension than the project. It is not like branches are for coders and plans, scrums, tasks, and all that stay on a distant galaxy. Task branches close the gap.
Often, developers not yet in branch-per-task tend to think of tasks as some weird abstract artifact separated from the real job. It might sound weird, but I bet you’ve experienced that at some point. When they start creating a branch for each task, tasks become something they touch. Tasks become their reality, not just a place where some crazy pointy-haired boss asked them to do something. Task branches change everything.
Handling objections
But, do you need a task in Jira/whatever for every task? That’s a lot of bureaucracy!
It is a matter of getting used to. And it takes no time, believe me. We have gone through this many times already.
Once you get used to it, you feel naked if you don’t have a task for your work.
Submitting a task will probably be part of some product manager/scrum master/you-name-it most of the time. But even if, as a developer, you have to submit it (we do it very often), remember every minute saved in describing what to do will save you an immense amount of questions, problems and misunderstandings.
I know this is obvious for many teams, and you don’t need to be convinced about how good having an issue tracker for everything is, but I consider it appropriate to enforce the key importance of having tasks in branch per task.
We use an issue tracker for bugs but not new features.
Well, use it for everything. Every change you do in code must have an associated task.
But some new features are big, and they are just not one task and…
Sure, that’s why you need to split them. Probably what you are describing is more a story or even an epic with many associated tasks. I’m just focusing on tasks, the actual units of work: The smallest possible pieces of work that are delivered as a unit.
Well, fine, but this means thousands of branches in version control. That’s unmanageable!
Plastic can handle thousands of branches!
This is the list of branches of our repositories that handle the Plastic source code (sort of recursive, I know 😉):

This was more than 18 thousand branches when I took the screenshot. Plastic doesn’t have issues with that. It is designed for that.
Now, look at the following screenshot: The main repo containing the Plastic code filtered by 2018 (almost the entire year).

You see on the diagram (the upper part with all these lines) the area marked in red in the navigator rendered at the bottom. Yes, all these lines just belong to a tiny fraction of what happened over the year.
So, no, Plastic doesn’t break with tons of branches, nor the tools we provide to browse it.
Ok, Plastic can deal with many branches, but how are we supposed to navigate that mess?
The zoom-out example produces this response very often. It can deal with it, but this is a nightmare!
Well, the answer is simple: You’ll never use that zoom level, same as you won’t set the zoom of your satnav to show all the roads in Europe to find your way around Paris.
This is what I usually see in my Branch Explorer: just the branch I’m working on plus the related ones, the main branch in this case. Super simple.
Task branches as units of change
We like to think of branches as the real units of change. You complete a change in a branch, doing as many checkins as you need, and creating several changesets. But the complete change is the branch itself.
Maybe you are used to thinking of changes in different terms. In fact, the following is very common:

This is a pattern we call changeset per task, and it was prevalent in the old SVN days. Every single changeset is a unity of change with this approach. The problem, as you understand, is that this way, you just use the version control as a mere delivery mechanism. You are done, you checkin, but you can’t checkin for the reviewer, narrating a full story, explaining changes one by one, isolating dangerous or difficult changes in a specific changeset, and so on.
Instead, we see the branch as the unit of change. You can treat it as a single unit, or look inside it to discover its own evolution.
What happens when a task can’t be merged automatically?
The purpose of task branches with full CI automation is to automatically test, merge, and deploy tasks when they are complete. The idea is that the integration branch, typically the main branch, is protected so nothing except the CI system or the mergebot driving the process can touch it.
So, what happens when a merge conflict can’t be solved automatically?
Consider the following scenario where a couple of developers —Manu and Sara— work on two branches. Suppose at a certain point Manu marks his branch as done.

The CI system monitoring the repo, or even better, the Plastic mergebot driving the process, will take task1213, merge it to the main branch in a temporary shelf, ask the CI to build and test the result, and if everything goes fine, confirm the merge.
The mergebot will notify the developer (and optionally the entire team) that a new branch has been merged and a new version labeled. Depending on your project, the new version BL102 may also be deployed to production.

Now Sara continues working on task1209 and finally marks it as complete, letting the mergebot know that it is ready to be merged and tested.

But unfortunately, the changes made by Manu, which were already merged to main to create BL102, collide with the ones made by Sara, and the merge requires manual intervention.
The merge process is driven by the CI system or the mergebot, but neither can solve manual conflicts.
So what is the way to proceed?
Sara needs to run a merge from the main branch to her branch to solve the conflicts and make her branch ready to be automatically merged by the mergebot or CI.

This is what we call a rebase in Plastic jargon, although it is quite different from a rebase in other systems. Check "Plastic vs. Git rebase" in the merge section.
Once the conflict is solved, the merge can be automatically merged to the main branch.

As you see, in a bot-controlled integration branch, only branches that merge cleanly are introduced and used to build, test, and deploy.
We don’t delete task branches
By now, I’m sure it is crystal clear for you how important task branches are for us. And, of course, we keep them around; we don’t delete them.
I cover this topic because users rushing away from Git frequently ask how they can delete their branches. They are as horrified at first when they learn they can’t!
What follows is an explanation of one of the key differences between Git and Plastic. If you are not really interested in some internals, you can definitely skip this section. You can find a more detailed explanation into Why we don’t delete branches in Plastic.
As I mentioned, in the Git world, it is extremely common to remove branches once they are merged. There are several reasons for this.
-
Branches in Git and Plastic are different.
In Plastic, branches are changeset containers, while in Git, they are just pointers.

This means that in Git, it is very easy to lose where a commit came from, while in Plastic, changesets always belong to a single branch, and their history is preserved.
In the image above, after the merge, you can’t figure out if commit
3was created intask002or master in Git, but in Plastic, commit3will always belong totask002.We imagine Plastic as a wise librarian — preserving history for the sake of not repeating mistakes and creating lots of knowledge from previous work.
I really like to show the blame of a file, spot a given line, and immediately see which task branch it was created in. This gives me lots of context. In Git, you simply lose that.
Yes, that’s why they like to squash branches, delete them, and so on, but we have a radically different vision about all that. We want to tell a story on each checkin, to help reviewers speed up their work instead of grouping tons of changes together into a single changeset ready to be merged.
-
Most Git GUIs crash with lots of branches.
We have +18k branches in our repos and Plastic doesn’t break. We have customers with way more than that. In Git, you need to delete branches because GUIs are not ready to deal with them. Open two of the most popular Git GUIs out there with as few as 1k branches and watch them crash. Not that they are mistaken or anything — they simply follow a different way of working. We optimized all our tools to be ready to deal with limitless numbers of branches.
A finished task must be ready to be deployed
Another thing to keep in mind: every task branch must be ready to integrate once it is finished. It might sound obvious, but it is a source of confusion in many teams.
"Yes, it is ready, but it can’t be merged because…"
That’s not good.
Once you set the task as "done," as a developer, it means it is ready to be delivered. However, if the change is not good enough, if it is fragile, or will make the product behave awkwardly, then the task shouldn’t be set as finished.

You are crossing a point of no return (actually, there will be a return if the task doesn’t make the cut of code review, build, testing), and you must be ready for it.
It is a small price to pay for automation, but it is really worth it. The only thing is that the team has to get used to it. I can’t stress that enough. Most of us grew up exposed to environments with lots of manual intervention. So, marking tasks as done was not that crucial. It was simply "yes, I’m done, just a small detail to polish before we deploy it and…". That’s not enough anymore.
If you or your team are not yet there, try to get used to it quickly. Done means ready for production. It can feel overwhelming at first, but it is not; it is a matter of getting used to, just about being a little bit more careful. In return, you get quite an immense peace of mind because you know that moving your task to production is easy and fully automated and not something that will require someone’s attention (maybe yours) at 2 a.m.
Feature toggles
If you are already familiar with feature toggles, maybe the entire section was irrelevant for you 🙂.
The question we all ask when confronted with "every task must be ready to deploy" is: what about parts of a bigger functionality that is not yet complete?
Because we already asked for tasks to be independent, which usually requires them to be carefully split. But, we came up with a new requirement: small and deployable, which sounds counter-intuitive.

You have a big feature split into 7 parts that will be converted to tasks and implemented using task branches. How is it possible to deploy Part 4 if everything else is not ready?
It’s effortless: You merge it to the main branch and even deploy it, although it will be hidden. It doesn’t need to be hidden for everyone; maybe you can enable the feature for the dev team or for a small number of early adopters. If nothing really works at the very initial phases, it can be simply hidden for everyone.
What is the advantage then if nobody will see it? So why should it be deployed at all?
Hidden doesn’t mean the new code is not passing tests on every release. When the entire feature is ready to be activated, the individual parts have been tested several times. And exercises in individual exploratory tests. And the integration of the last piece won’t trigger a big-bang merge, just a smaller part going through. And the complete deploy cycle, whatever your actual system might be, will be fully exercised.
It is all about setting up a workflow and sticking to it all the time, not only when things are easy or hard. You stick to a way of working and exercise it often so that those long release nights vanish away!
Review each task
How we started reviewing every single task
Eons ago, we tried to do formal reviews. You know, the entire thing with a moderator, a short meeting, a scribe, and the author explaining. We only did it maybe twice. Too heavy. It wasn’t natural, we didn’t really adopt it, and it was always being postponed.
So, we changed our minds and started the "no task is merged if somebody else doesn’t review it" around late 2012.
We suffered an initial slowdown for a couple of weeks, but then we all got used to it.
Code reviews proved to be great to train newcomers on "how things get done here" to keep some coherence in the design and the code simple.
Reviews are crucial to prevent code from rotting
Now, fast forward to the present and the DevOps era. Remember the slogan: a continuous flow of high-quality changes ready to be deployed.
You only achieve actual speed if the code stays ready to change. The keyword is stays. Code rots. It gets worse with time after a few changes here and there.
I always like to share this graphic coming from two classics, Boehm’s "Software Economics" and Beck’s "Test-Driven Development":
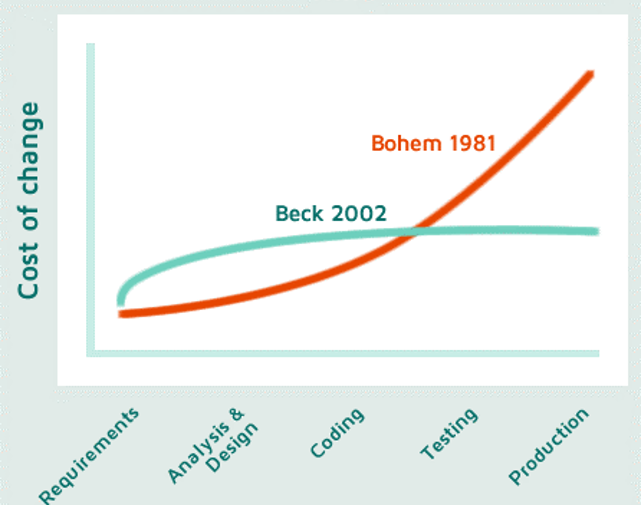
This is a nice graphic to help management understand why refactors and code reviews pay off 🙂.
Refactoring is the key practice, and code reviews only add to this effort. With every single finished task, there is a chance to make sure the actual design of the solution is fine, that the code is simple enough, and the style matches the rest of the team, etc.
Reviews to find bugs
Reviews are also great if they can stop new bugs before they reach the release. But, in my experience, it only happens if the review is very short. Really difficult or long tasks with many modified files or new ones are incredibly time-consuming and hard to review.
And here is where "checkin for the reviewer" kicks in: everything is much simpler with the developer’s help.
Some useful tips:
-
Separate the actual bug fixes from refactors (covered already).
-
Separate simple housekeeping changes from the key ones in different changesets. This will also help reviewers focus.
-
Mark changes you are unsure about. Don’t be shy to drive the reviewer. Is there something you are not really sure about? Say it. It can be a checkin comment or a note on the task (your Jira?) saying, "please, check cset 4893b715 because I’m unsure it will overflow". Otherwise, the risk is that an important change will go unnoticed, and the reviewer spends time on something pointless instead of the essential stuff. When we develop something big, with lots of new code, we practice this intensively to focus the reviewer’s attention on what really matters. Nothing prevents them from reading everything, but at least we know the key things are checked.
How many reviewers?
It really depends on the team. The key is to have at least one, so every task is code reviewed.
More than one can be great, at the cost of a bigger impact on everyone (context switches, extra work that piles up together with actual coding), and an increase in task cycle time (more people involved to move it forward).
We often have one reviewer, but in complicated tasks, ask more than one colleague to review specific parts they know better. It is not something that happens every day for us, though.
How to actually do the reviews
What tools? I hear you asking. Well, we provide a built-in code review system in Plastic, and at the time of writing, we just finished designing a major improvement. So, you can definitely use Plastic’s code review or go for a third party like Crucible.
You can even perform totally manual reviews; I’ve done this several times. I open a Plastic branch and diff changeset by changeset, and simply take notes in the issue tracker, in a new enclosure, of what needs to be changed. It is not super fancy or anything, but it works.
Validation – exploratory tests on each task
A short intro to Exploratory Testing
A great book on Exploratory Testing that we all love here: "Explore It!" published by Pragmatic Programmers.
Manual tests done by humans shouldn’t be repetitive tasks. If they are repetitive and follow a script, then they should be automated. Of course, time and budget restrictions prevent this, and many teams still do tons of manual testing, but in an ideal world, those are all executed by test frameworks.
What are Exploratory Tests, then?
Simply put: Exploratory Testing is traditional structured random testing. It gives some rules to organize a manual testing process that basically consists of letting the testers arbitrarily test the software instead of constraining them with a script (which could be automated). For me, exploratory testing is the same for testing as agile methods are to coding; it can look at code and fix, but there’s some order which prevents the chaos from happening.
Exploratory testing is based on well-planned and time-constrained sessions. First, the team plans what needs to be tested in advance and writes a set of charters or test goals. Then, they define what they need to test but not how to test it (you can always give some ideas to help, but you can’t create a script).
There are two important topics here:
-
Tests are planned: which means you get rid of chaotic, random testing.
-
Test sessions are time-boxed: you limit the time to test a given functionality or a part of your software, so you clearly state results should come quickly. Of course, complicated scenarios won’t be so easy to constrain. Still, you usually can expect results to come during the first minutes/hour of testing, which will help keep people concentrated on what they’re doing.
Each tester takes a charter and starts testing the assigned part of the software, creating a log called testing session in which they’ll write how long it took to set up the test, how long they were actually testing, writing documentation and also exploring unrelated but valuable pieces of software (you start with something and continue with something else you suspect that can fail).
The testing session will record all the issues (minor problems) and bugs detected.
So, there’s probably nothing special about exploratory (my explanation is very simple too) but it helps to organize a whole testing process; it tells you what you should plan and how (constrained times, normally no more than 2 hours per session), and also what results to expect and how to record them.
We record all the test sessions in our internal wiki and link each issue/bug to our bug tracking system, setting a specific detection method to determine how many issues and bugs were detected using exploratory testing. Linking from the wiki to the issue tracking and back allows for better navigation.
Validation
We call it "validation," although it is too big of a name that can invoke the demons of formal validation or something, so I better not go there.
This is how it works: someone gets the feature or bug fix and ensures it does what it should.
It is important to highlight that "validations" are not manual tests. As I said, we are supposed to automate those.
The validation is just trying to figure out if what we did makes sense for the user if it is usable if it really fixes the bug (even if a unit test or GUI test was added).
It is some sort of short Exploratory Test that helps ensure we produce a usable and consistent product. Validation can be as short as 5 minutes (switch to the branch, build the code, run it, set up an example, etc.) or as long as 1-2 hours if the scenarios to test are very complex. But, the usual is just 10-20 minutes each at most.
By the way, sometimes we do longer (1-4h) exploratory testing sessions following what "Explore it!" describes. We generate the reports for each session: Captured bugs, followed up with new tasks, etc. We do it when we have big features, but the actual daily practice is the short validations.
A small story on our experience with Exploratory
Around 2012 we hired an external team to help us do weekly Exploratory Tests, but it didn’t work as expected.
I mean, they were not finding the kind of issues we expected, and we struggled to find out why.
The problem was that the testing professionals were not used to most of the development tasks related to the daily use of Plastic SCM. We thought we were doing something wrong. But, at the end of the day, in my opinion, you need testers who resemble the kind of users your software will have.
And Plastic SCM users are… well, developers. They know how to use Eclipse, Visual Studio, the command line, doing branching, merging, diffing code, creating actual code… the sort of things the external testers we hired were not used to, and that’s why we failed.
Nowadays, daily validations and code reviews are part of our day-to-day development, and of course, they are time-consuming, but we considered that they are worth every minute. We try to organize our days to avoid interruptions, so many do the pending reviews and validations early in the morning, then the rest of the day can be spent on development.
Some extra pros of task branches
I’ve described the branch-per-task pattern in detail and talked about the task cycle and its main elements, so hopefully, you’ve already concluded why the branch-per-task approach is a good practice.
Now, I’ll highlight why the branch-per-task pattern is the best way to develop and collaborate for nearly every team, almost all the time (there will be circumstances where you won’t need to branch that often, but believe me, it won’t be so common).
Colliding worlds: serial vs. parallel development
Let’s look at a typical project following the serial development pattern, better known as mainline development (not to be confused with trunk development). It just means there’s a single branch where everyone checks in their changes. It’s straightforward to set up and very easy to understand. It’s the way most developers are used to working with tools like Subversion, CVS, SourceSafe, etc.

As you can see in the figure, the project evolves through checkins made on a single branch (the main branch). Every developer does a series of checkins for their changes. Since it’s the central point of collaboration for everyone, developers have to be very careful to avoid breaking the build by doing a checkin that doesn’t build correctly.
In the example figure, we see how Vio creates a new loading form (cset: 123) but makes a mistake, and then she has to fix it in a later check-in (cset:125). It means the build broke between 122 and 125. Every developer updating their workspace in between would have been hit by the bug, and it most likely happened to Borja after he checked in cset:124 and updated his workspace accordingly.
Also, if you look carefully, you’ll see we’re mixing together important changes like the one made on cset:121 (a big change on one of the core queries, which could potentially break the application in weird ways) with safer ones like the typo fixed in cset:122. What does that mean? It means that if we had to release right now, the baseline would not be ready or stable enough.
Let’s see how the same scene looks like using parallel development with the branch-per-task method:

As the picture shows, several branches are involved since every task is now a branch, and there are merge arrows (the green lines) and baselines (circles). We could have created baselines before, but you’ll find it’s much easier to know when to create them by using a branching pattern.
Using this example as a basis, I’ll start going through the problems we can find in serial development, how to fix them with task branches, and why this parallelism is better.
Code is always under control
How often do you check in when you’re working on mainline development? I bet you’re very careful before checkig in because you don’t want your co-workers coming to your desk, shouting about the code not building anymore, right?
So, where’s your code when you’re working on a difficult task— something hard to change that will take a few days to complete? Is it under source control? Most likely, it won’t be since you’re reluctant to checkin things that don’t compile, that are not complete, or that simply collide with other changes.
This is a big issue and pretty normal with mainline development; changes are outside version control for long periods, until developers are completely done. The version control tool is used just as a delivery mechanism instead of a fully-fledged VCS.
With the branch-per-task approach, you won’t have this problem: you can check in as often as you want to. In fact, it’s encouraged. To preserve your own development process, this enables you to even tell a story with your checkins, as we covered in the "Checkin for the reviewer" section, to preserve your own development process.
Keep the main branch pristine
Breaking the build is something widespread when using mainline development. You check in some code that you didn’t test properly, and you end up breaking some tests or even, worse, introducing code that doesn’t compile anymore.
Keeping the main branch pristine is one of the goals of the branch-per-task method. You carefully control everything entering the main branch, so there’s no easy way to break the build accidentally.
Also, keep in mind that the usage of the main branch is totally different from a branch-per-task pattern. Instead of being the single rendezvous point for the entire team, where everyone gets synchronized continuously, and instability can happen, the main branch is now a stable point, with well-known baselines.
Have well-known starting points - do not shoot moving targets!
When you’re working in mainline mode, it’s not often easy to describe the exact starting point of your working copy.
Let me elaborate. You update your workspace to main at a certain point, as you can see in the following picture. What’s that point? It’s not BL131 because there are a few changes after that. So, if you find an error, is it because of the previous changes or due to the ones you just introduced?

You can easily say, "Well, if you’re using continuous integration, you’ll try to ensure the build is always ok, so whatever you download will be ok." First off, that’s a pretty reactive technique - where you first break the build and later fix it. Secondly, yes, you’re right, but still, what is this configuration? If you update at the indicated point, you’ll be working with an intermediate configuration, something that’s not really well-known - you’ll be shooting a moving target!
Now take a look at the situation using task branches:

As you can see, there’s a big difference. All your tasks start from a well-known point. There’s no more guessing, no more unstable configurations. Every task (branch) has a clear, well-known stable starting point. It really helps you stay focused on your own changes.
Update with trunk-based devel.: I took this entire section from some writing I created years ago, dating almost to the very first days of Plastic. Most of what it says is still true, so it made sense to me to add it for clarity. There is one major shift here: we used to do manual integration long ago, where every single task branch was manually merged to main by an integrator (or build master). Now we automate all that. So how does it change the shooting a moving target problem? Well, now every new single changeset in main is totally trustable because it passed all tests. There are no intermediate integration changesets anymore, so you are fine creating a new branch from each new changeset, no problem. Of course, the full moving target stays true for teams still stuck to checkin to main and done because if that’s the case, they might still be on shifting sands.
The psychological side: As mentioned above, it is crucial to ensure every task starts from a stable point. The reason goes far beyond coordination and preventing bug spreading. It has an impact on productivity. If a test fails in your new task branch after a few checkins, you know it is your stuff. It is not finding how’s to blame. It is about the productivity impact. When something fails, and you don’t know for certain if it worked before, you’ll have to spend minutes fighting your brain that already thinks that the bug was provoked by someone else. Funny but true. Didn’t happen to you? But, if you are certain all tests passed in the base of your branch, you’ll jump straight to fixing the problem you just introduced.
Enforce baseline creation
Creating baselines is a best practice. Using the branch-per-task method, baselines become a central part of your daily work. There’s no better way to enforce a best practice than making it an integral part of your workflow.
Automation note: Yes, if you are already using full automation, this point will be more than obvious to you 🙂.
Stop bug spreading
People dealing with dangerous materials work in controlled environments, and usually behind closed doors, to prevent catastrophes from spreading if they ever happen. We can learn a valuable lesson from them.
Look at the following mainline example: Vio introduces a bug, and immediately everyone hitting the main branch will be affected by it. There’s no contention, there’s no prevention, and the actions are entirely reactive. You break the code, and yes, you fix it, but the build should not have been so easily broken in the first place.

Now, let’s take a look at the same situation with task branches. The bug will still be there, but we have a chance to fix it before it ever hits the mainline. There’s contention, and there’s a preventive strategy in place.

Automated tests passing on each task branch
I can’t stress how important automated tests are for task branches and any software project.
Thanks to automated testing, we can refactor and clean up code, something key for a codebase, especially if you expect it to survive a few years.
It wouldn’t make much sense to do task branches or even trunk-based development if it wasn’t for automated tests. What would be the gate to decide when a branch must be integrated? Just the code review wouldn’t be enough.
Automated tests are the gate to main
Every task needs to be reviewed (and validated optionally) before being merged. But the last step, the actual gatekeeper, is the automated test suite.

That’s why you need a solid test suite to implement useful task branches like it is for trunk-based development and DevOps overall.
The Test Pyramid
Check out this article on The Practical Test Pyramid. It is a concise explanation of the famous Test Pyramid:

A simple rule of thumb: write as many unit tests as you can and as few UI tests as you can.
Want to learn why? I’m going to share our own experience on the matter.
Unit tests
Unit tests should be fast, reliable (unless you really write some messy ones), and capable of testing everything. Yes, if you think you really need an integration test because "it can’t be tested with unit tests," I bet you are wrong. I know I was.
Now, we create more unit tests than ever and less and less GUI and smokes. Of course, some are always needed, but the fewer, the better.
Service/Integration tests
We call them smoke internally, but they are sort of integration tests.
We extended NUnit long ago and created PNUnit (parallel NUnit), and we use it to sync the launch of client and server on different machines.
Tests are written in C# and automate the command line.
Our mistake: Each test takes between 4-15 seconds to run. Too slow. We didn’t realize it at the beginning and created tons of them. Many are still in service.
Test slowness ends up creating the "new versions are an event" problem, which is one of the key ones to solve when implementing true DevOps. Otherwise, new versions or releases are something painful that the entire team will try to postpone. And it all ends up in long nights and weekends. Not the way to go.
Fortunately, smokes are stable and false positives are not common.
UI tests
We also have a bunch of UI tests. They can detect UI issues and help avoid regressions.
In our case, they need to start the server, wait for it to be ready, and so on. And well, they are the root of all evil.
I mean, unless you write them really, really well, they end up being fragile (the worst that can happen to an automated test suite).
We rewrote many GUI tests over the years. This is how the whole thing evolved:
-
First, we started with the "record and rerun" technique (offered by many vendors), which proved to be a nightmare (auto-generated code ends up being a mess).
-
Later, we moved to just writing code to create tests because, while more difficult to write at first (not really, but you do need programmers for that, and well, we are programmers anyway, so not a big deal for us), it ends up paying off because you have more maintainable tests that you can easily refactor and adapt when the UI changes.
But, even with coded GUI tests, we were hit by long tests and the unavoidable issue of "control not found" that comes with all UI Automation packages I know.
That’s why we ended up writing our own small framework for GUI tests, but that’s a whole story in itself.
Start small
If you are reading this and your team already has a solid test suite with great test coverage, then you are all set.
If not, let me share a trick: start small. I’ve seen so many teams being discouraged by their total lack of tests. "We’ll never get there," they thought. But, of course, you can’t pass from zero-tests to 10 thousand unit-tests by stopping all development and just focusing on testing for months. That’s not realistic. Business must go on. So, what can you do? Battle inertia. The easiest is to simply continue with zero tests. Write one today, have a few in a week. Keep adding. In a month, you have a small number. In a year, the code will be quite well tested. The alternative is to sit exactly where you are now in a year, which I bet is not such a good choice.
Automated tests are a safety net
I like to think of tests as a safety net that gets thicker and thicker as you keep adding more.
The following picture shows what I’m trying to explain:

-
First, you have no tests, and all kinds of bugs go through.
-
Then you build your initial safety net. It is too wide, so it only catches massive issues. That’s good though, at least you are sure the massive issues won’t happen again.
-
You keep adding tests to catch even smaller bugs.
-
At a certain point, your test-net is so thick only tiny bugs can escape 🙂.
The "safety net" example also gives you a good idea for the strategy to follow: focus on catching big issues first.
A couple of rules we follow:
-
Every bugfix adds a test, so this bug doesn’t happen again.
-
Every new feature adds new tests. Reviewers, in fact, reopen tasks if the new code is not tested.
Both techniques help even if you don’t have a test suite in place; they’ll help move things forward.
Every release is a release candidate
In "A finished task must be ready to be deployed", we saw how, as developers, we must be ready to say goodbye to the task and let it fly on its own to release, without us doing any further work on it as soon as we mark the task as done.
Well, this is because every single task merged to main must be ready to be released. The release machine wouldn’t be ready for the DevOps league if new changesets on main are not really stable, really prepared, or "wait, yes, but we need to make more checks because…".
This means that a situation as follows would be perfectly normal:

For SaaS products, this would be desirable because your team will simply update the cloud software, and users will immediately see improvements without any required upgrades.
There will be cases, though, where publishing every release won’t be that desirable because you don’t want to run users crazy with 19 new releases every week. So, the solution is quite simple and obvious: don’t make every release public.

Extra testing – grouping releases
Finally, there will be cases where you need to pass an additional test suite before publishing. Again, t is not ideal, but slow test suites or the need to run load tests for hours before deploying the new version might force you to do that.
If that’s the case, the situation will look as follows:

Teams can perfectly label each new build, but sometimes it is better to save labels for real versions ready to deploy and use attributes for build numbers. We use this method ourselves when releasing Plastic. Every new changeset in the main branch has a build number, but only real stable releases have labels.
As you can see, build BL132 is used to launch tests grouping the new tasks merged from 129 to 132.
While the test suite passes, new tasks can reach the main branch:

Then, after the release test suite passes, the new version is labeled:

Consider this a huge warning: This practice will create broken builds. The task test suite won’t be complete enough because it requires a second test suite to pass, so the second one can detect issues that prevent the new version from being released. If that happens, you are in a broken build. So you’ll need a new task to fix it, and it must reach the main branch as quickly as possible to revert the broken build status.
The situation, is not as bad as breaking the build with every task because your main branch might not be good enough to go public for everyone. However, it can be still be deployed to smaller groups or even to the internal development team, which is good for dogfooding.
Be selfish with tests and clean code
We can all talk for hours about how great having near-perfect test coverage, and pristine code is. It is good for the project, for the business, and it is great to react fast to requirement changes. We all know that.
Let me share a different point of view: be selfish.
-
Keep your code clean just because every skeleton in the closet will come back and bite you. We’ve experienced this many times over the years.
-
Run tests just for your peace of mind. Do you want to be constantly interrupted with super urgent stuff that needs to be fixed now? No? We don’t either. Tests keep you safe from interruptions because the big, urgent things shouldn’t happen.
Trunk-based development
What exactly is trunk-based development, and how does it blend with task branches?
What is trunk-based development
It is a technique to ensure that all changes reach trunk quickly, and every change is correctly reviewed and tested. You can find out more about it on Hammant’s super site. Trunk is the main development line, "main" in Plastic jargon.
Trunk-based development is the foundation of "continuous delivery."
It requires continuous integration; changes get continuously merged into trunk as soon as they are known to be good (peer-reviewed and tested with an automated test suite).
Trunk-based development is not the same as mainline development. Remember the old days with everyone just doing checkins to the main branch? (SVN anyone?). No, it is not the same thing. Trunk is all about making sure the build is stable, ready to be deployed. Nothing to do with the old mess.
Task branches blend well with Trunk-based development
Before you cringe, trunk-based development is compatible with short-lived task branches.
I wouldn’t even call these branches "feature branches" at all because it might be misleading. A feature can take a long time to implement, so the branch grows too old.
I prefer "task branches," which are sometimes used interchangeably, although the meaning is quite different.
Tasks are short, or at least they should be. How short? 4h, 8h, ideally no longer than 16hours.
Features are longer than that, so we just split them up. Task branches are great for that purpose, and they blend nicely with trunk-based development.
Why do I insist on using task branches instead of just doing checkin?
Well, suppose you are working in a distributed environment. You can checkin locally and then push, can’t you? After all, this ends up being a "local branch," and you have a place to checkin as frequently as you need before hitting "main." You can do this with Plastic when you work distributed, of course.
Now, why should it be different if you are working centralized? You can create branches, checkin often then set the branch as ready to be merged to main.
In both cases (distributed and centralized), short task branches bring lots of benefits:
-
The task branch is the actual "change container." You are not tied to a "single checkin"; you can checkin as often as you need. (I tell a story in my checkins, so reviewers can go changeset by changeset following my train of thought instead of hitting the full diff. It is great for big refactors).
-
You can easily review the code before it gets merged. It is a branch, after all. There is no need to create other artifacts (like temporary checkins or send the diffs around to a code review system). Just review the branch.
-
The branch can be merged in a single step. If something goes wrong (build, tests, whatever), the entire branch gets rejected.
How do task branches blend with distributed development?
I didn’t mention distributed development so far. The reason is that all the practices described so far apply equally to distributed and centralized development.
It doesn’t matter whether you create branches on your local repos or in the central one in Plastic. You can benefit from task branches on both.
The only difference is that you’ll obviously have to push your local branch to the central repo if you are working distributed. You can push as many times as you need; no worries if your CI system can take only task branches marked as done. All our native CI integrations can do it: Jenkins, Bamboo, and TeamCity.
Automation, orchestration and mergebots
I have made my point clear by now: task branches are great if they are supported by good automation. You need good automated testing and a CI system in place.
You can implement DevOps + trunk-based development + task branches using Plastic and Jenkins, Plastic and TeamCity and Plastic and Bamboo, or even integrate through the GitServer interface.
We wanted to make things easier for teams implementing Plastic, though. That’s why we added mergebots. A mergebot is a piece of software that monitors your repos and trigger builds when certain conditions are met. It merges the task branch first, creates a temporary shelf with the merge results (if the branch merges cleanly), and then asks the CI system to build and test the shelf. If tests pass, the mergebot will confirm the merge and label the result.
The mergebot can notify each step to the team using email, Slack, or even custom-created notification plugs. It can also consider task status from issue trackers and make changes based on the actual merge result and test phase.
The Plastic webadmin interface includes a DevOps section to configure and monitor mergebots.
Learn more about mergebots.
What about GitFlow?
If you’ve never heard of GitFlow, you can skip this section entirely.
But, if you’re wondering why we prefer the task branches strategy better than GitFlow, then keep reading.
GitFlow was introduced back in 2010 and since then, adopted by teams all over the world. It is about creating different long-living branches called master (it would be main in our case), develop, and then release branches to articulate work.
I don’t like it because I think it is overdesigned for most teams. And I don’t mean it is good for teams doing very complex things. You can develop the most complex software and stick to a much simpler branch strategy.
-
You don’t need a develop branch. Just merge to main! It’s much simpler.
-
You don’t need release branches. Just merge to main and release/deploy from there. DevOps changed my view here.
-
GitFlow popularized feature branches, and feature branches are not the same as task branches. In fact, they can be a problem most of the time because they tend to live far too long before being merged back to main. In contrast, task branches are, by definition, super short-lived. The former encourages mini big-bang integrations, while the latter is a perfect fit for continuous delivery.
Yes, there will be cases where you really need a more complex structure than plain trunk-based plus task branches, but most of the time, they will serve you quite well.
How to learn more
There are a few resources that are a must to master branching:
-
"Streamed Lines: Branching Patterns for Parallel Software Development", by Appleton and Berczuk, the writers of the incredibly good "Software Configuration Management Patterns".
-
"Trunk Based Development", by Paul Hammant. Trunk-based is a great way to keep things simple, blends well with task branches, and it is what most teams use to implement DevOps.
Repo layout strategies
How many repos should you create? When is it better to organize different reusable components into separate repos? What is a monorepo? What are Xlinks? And what are submodules?
This chapter will answer all these questions and a few more, always sticking to a conceptual approach to help you better understand the version control techniques and practices.
What is a repository?
A repository is the storage of versioned content.
Too theoretical?
Let’s try again. The database that contains all the versions of your files, plus the branches, the merges, the changesets with their comments, labels, attributes, moves, and renames.
We make a key distinction between two conceptually different parts:
-
Data: the actual bytes of each revision of each file. If you upload a foo.c, the actual content is the data. If you upload a 3GB .mp4 intro video for a game, 3GB is the data.
-
Metadata: file names, directory structure, comments, dates, authors, branches, merges between branches, labels… Simply put, anything that is not data.
Repository is a general concept used by almost all version control systems. Git calls it repository too, and in Perforce, it is formally known as depot, but repository is a valid synonym too. You’ll often find it written as just repo for short.
Repository storage
It is not my intention to go under the hood and into the internals here, but just take a quick look into how repos actually store. Since chances are you have a strong technical background, I’m sure you’ll appreciate understanding how things work. (If not, feel free to skip this, I don’t want to bore you with the gory details).

We have two main types of storage in Plastic SCM. They are completely transparent outside the server. I mean, when you are doing a checkin, or merging, or doing diffs, or even running a replica, you don’t really care whether your server is storing repos in SQL Server or Jet. In fact, servers talking with each other don’t care either. Client-server and server-server communication are totally independent of the storage backend.
That being said, the two major storage types are:
-
Jet. It is our own ad-hoc, heavily optimized storage. It was first released in late 2016 after years of sticking to traditional database systems and avoiding reinventing the wheel at all costs. But, finally, we admitted that having our own storage, specifically designed to deal with Plastic repos, would get much better performance results. Today, Jet is the default backend for repo storage, both on tiny single-user installations and our largest customers with terabytes in each repo and thousands of concurrent users.
-
Standard database systems. We support many of them, although the server is only optimized to work with two for heavy load: MySQL and SQL Server. SQLite is good for single users working distributed and for really small teams. We don’t recommend any of the others for big teams, not because they can’t scale, but because we didn’t optimize the Plastic server to work with them.
If you want to learn more about the story of Jet and why we finally reinvented the wheel, read the story of Jet.
Number of repos and maximum size
There are no limits on the number of repos and maximum size of each repo in Plastic SCM, other than what the physical disk limits impose.
-
You can have as many repos as you need.
-
Each repo can be as big as you need. We have customers with repos as big as 5TB.
One project, one repo
Let’s start simple. If you have one project, create one repo to host it.
There are teams with many different independent projects, something like this:

We have a customer with more than 3000 developers on the payroll, and their main server hosts more than 2000 repositories. They have many small teams working mostly independently from each other on different repositories. Most repos contain software deployed independently (sort of microservices) while it evolves over the years.
Another corporation in a different industry has more than 4000 repositories on the main server. Not all of them are live since many contain projects that were already finished and no longer evolving.
There is another one with more than 1000 developers, part in Europe, part in South America. They also have more than 4000 repos. Most of them contain small projects developed by teams ranging from 2 to 20 developers. Each project is an application deployed independently to production, controlling a different part of the business, or providing different interfaces to their stuff. They develop enterprise software for their own business. Some applications have requirements to be deployed together, but their repos stay independent, and they control those dependencies from their CI systems.
Not all our customers are so large. For example, we have teams with less than 10 developers who work on projects for different customers and created several dozens of repos over the last 10 years.
What I’ve described so far were independent repositories. It doesn’t really matter how big or small they are. They do not have dependencies on each other. It means they are quite easy to understand and manage.
Xlinks: Reusable components
Things get more complicated when you need to deal with reusable components.
The following is a common scenario for teams developing games, although the pattern is general for any reusable component.

All different games share a 3d engine evolved by the same or a separate team. It doesn’t make sense to copy the same code in all games, of course, so the logical option is to separate it in its own repo and xlink to it.
An Xlink is a Plastic artifact to link repositories. Think of it as a special symlink between repos. I’ll be talking more about it later in different sections of this book. (You can also read our guide about Xlinks.)
The challenge with repositories and components is that things can quickly get complicated as you can see below.

Here we see three products all sharing the same set of components. The number of Xlinks to create between them grows. From a conceptual perspective this can be a very perfect solution, as long as it doesn’t become a nightmare to maintain.
Keep it simple - Don’t overdesign your repo structure
Component repos and Xlinks are great tools, but Uncle Ben said: with great power comes great responsibility.
The big risk is to start seeing components everywhere, start dividing the codebase into too many repos too soon and end up in a big unmanageable mess.
This is something we have seen so many times over the years in all kinds of teams. They get excited about isolating repositories and discovering components, creating a bigger problem than the original tangled monolithic repo.
So, yes, you can have many different repos, but use them with care.
Monorepos – don’t divide and conquer
Monorepos have been gaining popularity over the past few years. Legends say that Google hosts its entire gigantic codebase into a single mega large repository.
Why on earth would they do that?
-
Bend repository boundaries. The boundaries of a repo are strict. It means if you put something on a repo, it is not easy to move it to a different one. Of course, you can always copy the files and checkin to a separate repo, but losing history and introducing the risk of duplication.
-
Shared knowledge. If you split the overall project into pieces, many teams and individuals will just be aware of the few parts they work on. They’ll never look into the rest of the repositories for something they need, primarily because simple tools like searching and grepping won’t help them. Very likely, this will end up in duplication of code and efforts.
-
Easier to refactor. Suppose you have a component used by 30 different products. If you just download the repo that contains this component, it won’t be safe to apply a rename to a public method or class used externally without a big risk of breaking one of those 30 projects potentially using it. If everything is on a single repo, you’ll have the 30 projects on disk, and the refactor will be easier.
According to Paul Hammant in his great trunk-based development site, Google, Facebook, Uber and Netflix use monorepos. And, when famous tech giants adopt a technique, it gains some credibility.
Submodules
There is one more thing to add to the repo tool belt: submodules.
Submodules are a great way to organize repositories in hierarchies. In fact, the main practical advantage they introduce is defining a namespace in your otherwise flat repository naming structure.

As you can see in the figure, you can have a repository ci and then many child repositories ci/bamboo, ci/Jenkins, with as many levels of nesting as you need.
|
Tip for teams using relational databases as storage
Although we are now primarily standardized on Jet, there was an advantage for large teams using relational databases as storage. Submodules are stored into the same physical database as the main repo they belong to. This is interesting when you need thousands of repos, and your IT department complains about managing thousands of databases. Submodules are quite practical in that circumstance. |
Practical advice: Fantastic repos and when to create them
After going through some of the basics, let’s see if I can give you some practical advice that helps you structure your projects in Plastic SCM.
Keep it simple
This is a mantra in software development. Try to keep things as simple as possible. For example, ask yourself several times if you really need to create a component repo.
Overdesign will normally bite you harder than a too simplistic approach.
Monorepos are fine
I have to admit that before reading about monorepos as a legit approach, I always thought putting everything on the same repo was a little bit of a mess.
But, let me share how we structure our main repo to illustrate how we implemented monorepos internally.
We work on one main product: Plastic SCM. But at the time of writing this book, we have two other secondary products: SemanticMerge and gmaster.
We manage the three on a single repo called codice, as you can see below:

-
SemanticMerge uses part of the code under client to take advantage of some of the text merge algorithms in Plastic. Also, some of the actual semantic core is under client too, outside the SemanticMerge directory because it is used by Plastic and Semantic.
-
gmaster uses SemanticMerge entirely, including common parts shared with Plastic.
-
Plastic itself uses semanticmerge.
We could have certainly structured it differently with Xlinks as follows:

But since both gmaster and SemanticMerge require pieces inside 01plastic/src/client to build, the two new repos wouldn’t build in isolation. We can admit that, they only build with mounted inside codice. But, if that’s the case, what’s the point in isolating them? Plastic doesn’t really have repo size issues, so the division would be quite artificial and impractical.
Another alternative would be to split the repositories differently, so both SemanticMerge and gmaster can be built separately from the main codice repo. For example, a stricter separation in components would be as follows:

I marked web inside gmaster in green because this could also be an opportunity for another Xlinked repo.
We can continue our splitting flurry, but the question is: does it really make sense? Plastic can certainly cope with all those repos but, does it really make sense for the team?
In our case, the answer was no.
Everything was simpler with a single code repo. Even the website for gmaster is on the same repo because this way, it is very easy to build the same REST API definition both in the client and the server and refactor accordingly instead of splitting. It could be a good candidate for a different repo but, why?
I don’t mean it is good to have a big mess in the repo. We are super strict with directory and file naming, and with what goes into each directory and so on, and we frequently reorganize directories when things don’t look nice anymore. But a single repo serves us well.
Sometimes you need Xlinks
I explained my view about how important is to keep things simple, but of course, there are cases where splitting and xlinking is really the best option.
How can we distinguish the scenarios?
It all depends on practical and organizational restrictions.
-
Size. Can your organization afford everyone on the same big repo or is it too large that it doesn’t even fit on the developer machines? Sometimes, especially in game dev, we find repos so big that a single full working copy would be several terabytes. They could cloak the repos to only download parts of it, but splitting sometimes is easier to understand to avoid issues.
-
Historical reasons. Some teams already had many different repos in their previous version control. They are used to that, their build files are ready for that, and they want to minimize the impact when switching to Plastic.
-
Privacy. Several teams share the same 3d engine, but each develops a different game and is not allowed to see what others are doing. They all contribute to the engine with changes, and they can all benefit from improvements, but seeing each other’s code is not doable. The same scenario applies to different companies contributing to a bigger overall project, where each of them is only allowed to work and see certain parts.
Centralized & distributed
Should you work centralized or distributed? Which mode is better? Is it possible to combine both? What would be the advantages? What is the difference between an on-premises server and a Cloud solution? What are proxy servers?
These are some of the topics we’ll be discussing in this chapter.
Centralized and distributed flavors and layouts
What is distributed and centralized
If you’re familiar with Git and Perforce or SVN, you know what distributed vs. centralized means. If not, check the following explanation.
Centralized means you directly checkin to a repository (repo) located in a central server, typically on-premises.

Subversion, TFS, and Perforce are typical examples of the centralized workflow. Plastic can work in this mode too.
Distributed means you always checkin to a local repo in your machine, then push your changes to a remote repo on a server.

Distributed is great because every checkin is local, so it is super-fast (no network latency potentially biting you). The downside is that you need two operations to reach the central repo: checkin and then push. This is not a big issue, of course, considering the benefits, but our experience tells us that it is like torture for certain profiles. In video games, for instance, artists hate push and pull. Checkin and done is more than enough for them.
Plastic can do centralized and distributed
We chose the name Plastic because we wanted to be flexible (yes, there are rigid plastics 😉). So, Plastic can be as fully distributed as Git is or work fully centralized.
To work distributed, we need to provide local repos, and that’s why Plastic runs a super lightweight local server. It is the same codebase that can scale up to manage thousands of concurrent users and millions of requests per day but tuned down to be as quiet and resource-constrained as possible.
Is distributed better for branching and merging?
There is some confusion about this that I think is worth covering. Some developers wrongly believe that you need a distributed version control to do proper branching and merging.
That’s why only a few version controls were good with branches before 2005. That was the year when Plastic SCM, Git, and Mercurial were born. All of them are distributed, and when Git got worldwide popularity, everyone thought good branching was a DVCS thing.
I’m a version control geek, so I must say that while SVN, CVS, Visual Source Safe, Perforce, and a few others were truly weak with branches and merges, Clearcase had a pretty high bar. It was very good, but it was hard to install, extremely expensive, and after the IBM acquisition, it got more bad press than good. But it was one of the strongest systems ever made.
Getting back to the point, you can do super-strong branching and merging with Plastic while working centralized.
On-premises and Cloud
You can install your own Plastic SCM server at the office. This will be an on-premises server. This might sound obvious, but I think it is worth making it crystal clear, especially for non-native English speakers 🙂.
Then, we offer a service to host repositories in the cloud, managed by us, so your team is freed from the sysadmin burden. So that’s the Cloud option.
What impact is there when choosing Plastic Cloud vs. on-premises on the distributed/centralized strategy?
None! You can work perfectly centralized or distributed with Cloud or on-premises. The only downside you might have is the added network latency if you compare Cloud with a server hosted in your office.

Mix distributed, centralized and Cloud
Something you must keep in mind when designing the actual version control layout for your company is that Plastic gives you a range of choices. You don’t have to force the entire team to stick to a single pattern. Some can work centralized, some distributed, some connected to the cloud, and you can even create multi-site setups.
The following diagram is an example of a possible setup:

-
There is a co-located team with an on-premises server where one team member is doing direct checkins while the other prefers to work distributed.
-
The on-premises server push/pulls to the cloud. Cloud can be used as a backup of the central site or simply as a better way to give access to external contributors to the project.
-
Then two team members working from home: one using distributed, the other sticking to direct checkin.
Multi-site
Multi-site stands for having multiple on-site servers connected through replicas. (Important: We call replica to push/pull, nothing new.)
The scenario can be as follows:

-
Two teams.
-
Each has its on-premises server.
-
Team members at both sites checkin locally or distributed but benefit from the speed of a close on-premises server.
-
Servers push/pull between each other to keep fully or partially in sync.
Multi-site was an essential concept before distributed version controls were widely adopted, as almost the only way to connect different sites.
Is multi-site still relevant nowadays?
-
In reality, it is just a different form of distributed.
-
Many teams can benefit from a super simple workflow sticking to direct checkin to a local server.
-
Different servers are kept in sync using replica (push/pull) triggered by a script that can run continuously, or just a few times a day, depending the team’s needs.
-
Of course, if every team member works distributed, there wouldn’t be a big need for on-premises servers on each site, except if you need to run some CI tools locally.
-
Cloud can be added to the previous picture as a third site that can act as a single source of truth.
-
Many other sites can be added to the picture.
-
The on-premises servers are connected through the internet. They can have an open SSL port or bypass proxies using Plastic Tube, our own P2P protocol. Of course, any commercial VPN or tunnel software can be used to create the virtual link between servers.
Recommended layout
My recommended layout is the same I made for branching patterns and repo layouts: Try to keep things simple, from an IT perspective and for the team members using Plastic daily.
What I mean by this is:
-
If all your developers can use distributed, there is no big reason not to go for it. Use a Cloud server as a single source of truth, and you are done.
-
Do you really need an on-premises server? If not, stick to a Cloud one. If you really need it, then yes, go for it. It won’t require much maintenance, but always more than if you don’t have one.
-
You have multiple teams on multiple sites. Can they all stick to distributed? Then, maybe you are good with a single central server, and they all push-pull to it. If not, then it is good to go for multiple sites and servers on each.
In short, Plastic gives you all the flexibility, but it doesn’t mean you have to use everything 🙂.
Proxy / cache server
You have another choice to connect distant sites: the cache server, a.k.a. proxy server.
It is a straightforward piece of software; it caches data (not metadata), so it’s not downloaded from the distant server each time, saving network bandwidth and time.
The following diagram explains how the Plastic clients (GUI or command line) and a proxy/cache server work:
-
Checkin goes directly to the central server, so the proxy doesn’t speed up the operation.
-
Update tries to download the data from the cache server. If the data is not there, the cache server will download it from the central server and cache it for the next request.

As you can see, the functionality is straightforward.
The typical scenario is a co-located team that usually works with big files and is connected to a distant server.

The team at Boecillo will benefit from faster updates (data downloads) if they have a proxy on-site because data won’t be downloaded all the time from Boston.
The scenario works well as long as the network connection works as expected. Proxies are a performance improvement, not a solution for multi-site. It is important to keep this in mind when you design your Plastic server infrastructure.

The downside with proxies is that if the network connection between the cache server and the central server goes down, the users won’t operate normally. For example, they won’t be able to checkin anymore, and updates will also fail because only data is cached, not metadata.

Having your repos on your machine or your on-site server for the entire team (fully distributed for the first option, multi-site for the second) allows you to have a solution resistant to network failures. The team can continue working even if the connection to the central server goes down.

If distributed and push/pull operation (a.k.a. replica) is superior to proxies, why do we support them?
-
A proxy is just a way to support centralized operations with some network optimization. For example, you might have a distant team that refuses to push/pull because of whatever restriction. This is very common with non-developers: They prefer to only checkin, and dislike dealing with an extra push/pull. A proxy might be a good solution if nobody is on their site capable of managing a server.
-
If you need to enforce non-concurrent operation on certain files (locking), you need to stick to centralized, and proxies can help distant teams.
-
Network performance: We have seen heavy load scenarios where customers decided to install a Plastic cache server on different network sections to decrease the network usage of the main server. All happening inside the same building.
In short, we strongly recommend using distributed if possible. Still, proxies are always an option when replicas are not possible.
It is important to note that some teams, especially those coming from Perforce, tend to prefer proxies over distributed because that is what their previous version control provided as a multi-site solution. So, please, keep in mind the options and remember Plastic can do distributed when needed.
How replication works - push/pull
After looking at what working distributed is and the layouts supported by Plastic in combining distributed, centralized, and even implementing multi-site, let’s look at how distributed works and what the push and pull operations do.
Globally unique changeset numbers
When you look in a Plastic repository, you’ll see that changesets are numbered as follows:

A changeset zero is automatically created together with the main branch when you create a new repo.
Then, as soon as your checkin changes, there will be other changesets, in my example, changeset 1 and 2.
But, these changeset numbers are local to the repository. I mean, they are good if you work centralized, they are meaningful and easy to remember numbers.
But as soon as you work distributed, local numbers are no longer suitable, and you need Globally Unique IDentifiers – GUIDs.
So, if you look carefully in your Plastic SCM Branch Explorer, you’ll see there is always a GUID number for each changeset.
Thus, changesets are identified by two numbers: locally by numbers and globally by a GUID.

The GUID is a long identifier, so in short, I’ll be referring to it in a shortened way just by its first section. This shorter section is not guaranteed to be unique, but it is usually good enough to refer to it in examples. And chances are, you can even use it to refer to a changeset globally to a team member since chances of a collision are small.
With that in mind, the previous diagram can be simplified as follows:

How push works
A push takes changes from one repository and pushes them to a different one. The repos can be on the same server, but they are typically on separate ones.
Let’s follow a simple example step-by-step, so we can ensure you get a solid understanding of how it works.
First, I start with a repo created on a server called juno. Fun fact juno used to be our on-premises main server years ago 🙂. By the way, instead of juno, it could be a local server, something like quake@local for Cloud Edition users, or quake@localhost:8087 if you have a local Team server on your machine. The actual operation will be the same.
As you can see, my quake repo has three changesets.
There is a different repo hosted in my Cloud organization: quake@gamecorp@cloud. Again, instead of a hosted repo in Plastic Cloud, it could be something like quake@skull:9095 for an on-premises server.
Notice how the changeset 0 has the same GUID in both repos. This is intentional. When we designed Plastic, we wanted it so that all repos had common ground so they could all replicate each other - more on this in a second.

Now, what if you now decide to push from main@quake@juno:9095 into quake@gamecorp@cloud?
The first thing Plastic has to do is to determine what needs to be pushed.
To do that, server juno:9095 connects to gamecorp@cloud and retrieves its changesets on the main branch. Then, it finds there is a common point: the changeset 0, and that the two "children" of 0 —`fc113a1e` and 3eef3b52— are the ones that need to be pushed to complete the replica.

Then, the source server juno:9095 (source of the push) will package the two changesets and send them to gamecorp@cloud, together with its corresponding data. I mean, it will send all the needed data and metadata.
Once the operation completes, the situation will be as follows:

At this point, the two repos will be identical.
Now, what happens if you checkin a new change to quake@juno:9095 and want to push again? Well, the same calculation will happen again:

This time, the server juno:9095 determines that 5c1e3272 will be the changeset that needs to be pushed because it found that the remote server already has 3eef3b52.
And this is how push works. It’s very straightforward.
Why normal changeset numbers don’t always match, and do we need GUIDs?
Let me go back again to the changeset numbering problem and the GUIDs. Let’s start with the example above: There is a new change 5c1e3272 to push between juno and gamecorp@cloud. But, a new branch was created in gamecorp@cloud.
Note that I’m starting to color changesets based on their origin: One color for the ones created at juno, a different one for those originally created at gamecorp@cloud.

The new changeset on branch task1273 at gamecorp@cloud has changeset number 3. It collides with changeset 3 created on juno, although they are obviously different.
Locally, each repo tries to follow a numbering sequence, and that’s why numbers can collide.
Check how the two repos look like once the new push operation is completed:

Changeset 5c1e3272 is local number 3 in juno, but number 4 in gamecorp@cloud.
That’s why you can only trust changeset numbers locally but need to use GUIDs if you work distributed.
I hope this explanation makes it obvious why we use the two identifiers.
Push vs. pull
I’m going to explain the difference between a push and a pull operation in Plastic.
The obvious is true: Push means sending changes from A to B. Pull is bringing changes from B to A.
In Plastic, you can push/pull repos hosted locally and repos hosted on different servers.
The following is a typical push/pull schema between a local repo (hosted on the server called local) and an on-premises server called juno.

When you ask your local server to push to juno, what happens is something as follows:

Your Plastic client connects to the local server and asks it to communicate with juno and negotiate the push. Then the steps described in how push works happen.
Now, when you pull from juno, you ask the local server to get changes from juno. Again, your client connects to the local server, then the local server connects to juno and negotiates the pull. The pull is quite similar to the push, but instead of sending changes, it simply performs a negotiation to download data and metadata.

But, remember that in Plastic, you can perform push and pull operations not only from local repos, like in Git, but also connect to remote repos.
Thus, the following diagram shows a pull operation pulling changes from juno into a new server called skull.

You first ask skull to pull from juno. Then skull connects to juno, negotiates the pull, and then downloads the metadata and the corresponding data.
Think for a moment about what I described. Unlike what happens in Git, you can trigger replicas from any server, not only from your local repos.
Then, in Plastic, you can achieve the same behavior in different ways: Pull from juno into skull is equivalent to a push from juno to skull.
The following diagrams illustrate the equivalent scenarios and highlight a key point: The operations are equivalent but not the required network connections.
When you pull from juno into skull, skull is the one connecting to juno. The diagram shows the direction of the connection and how the data is transferred.

The important thing to note here is that while the two previous operations are equivalent in data transfer, the required network connections are different. skull might be able to connect to juno, but the opposite might not be true, so the second alternative, pushing from juno to skull might be forbidden due to network restrictions.
The following diagram explores a new equivalence. A push from skull to juno is the same as a pull made by juno connecting to skull. But again, the network connections are different and the restrictions might disallow some combinations.

Hopefully I made this crystal clear. It is not difficult at all, but we often find users confused about the equivalences of push and pull between servers. That’s why I created a new summary diagram:

Finally, for the users that are going to use Cloud Edition or Cloud extension, look at the following:

-
You can pull changes from the Cloud, but the Cloud can’t connect to your local server to push changes directly to your local repo.
-
You can push from your local server to Cloud, but your local repo won’t be accessible from cloud, so it can’t pull from you.
Handling concurrent changes on replicated repos
All the examples I described so far were pretty easy because our imaginary developers were kind enough to only make changes on one of the replicated repos at a time, so there weren’t concurrent changes, so no need for conflict resolution.
Concurrent changesets on different repos
Now, it’s time to find out how to handle changes that happen concurrently. Let’s start with the following scenario. We initially started with a quake repo in juno that we pushed to gamecorp@cloud. Now, developers created changesets concurrently on both sides. As you can see, there is a new changeset 5c1e3272 on quake@juno and two new ones at gamecorp@cloud.

If you try to push from juno to cloud now, Plastic will complain, saying it can’t complete the push because it would create a multi-head on destination.
What in the world is a multi-head?
Multi-head explained
If the push were allowed, your cloud repo would end up like this:

Where both fb4f9ebc and 5c1e3272 would be heads. If that happens, which would be the changeset at the head of the branch? What would be downloaded when someone tries to update from main? Which changeset would be the selected one?
That’s why Plastic prevents the creation of multi-heads on push because it asks you to fix that situation in your source repo before you push.
Use pull to resolve concurrent changes on your repo
That’s why you will need to pull from Cloud before pushing your changes. Once you pull, the repo at juno will be as follows:

The two changesets created on Cloud will be downloaded and linked correctly. 89e9198d as a child of 3eef3b52.
The problem is that you are again in a multi-head scenario. In reality, the old head cset number 3 (5c1e3272) will still be the official head of the branch main at juno, but if you now try to push to Cloud, Plastic won’t let you complete the operation, warning you that you have two heads.
The update will still work correctly downloading cset 3.
|
Note on cset numbering
You can see how local changeset numbers (the integers) don’t preserve the original numbering. For example, |
What is the solution to this situation? We need to merge 3 and 5 to create a new changeset that will be the single head of main on juno, and then we’ll be allowed to push.
The figure shows how the new changeset b2667591 combines the two old heads and creates a unified head. Now the branch is ready to be pushed to Cloud.

Once the push to Cloud is complete, the result will be as follows:

As you can see, the final result, changeset b2667591, means that at this point, the two repositories are equivalent, although their evolution was different.
|
I drew the Branch Explorer differently on Cloud compared to juno to explain how it works. But, the Branch Explorer in the GUI will always place the changeset that is head of the branch on the principal subbranch. The real diagram will be the same on both Cloud and juno: The one I drew for juno above. |
|
We also introduced the concept of subbranches: They are like branches inside a branch. In reality, changesets form "trees", and while we expect a branch to be just a line, it can be a tree on its own. |
Sources of truth in distributed development
Single source of truth
When you work with a single central server, it is obvious which one is the source of truth: The repos on the server. Even if everybody has their repo with a clone or a partial replica of one of the repo and work in push/pull, everyone knows where the master is.

This is the model that most of the DVCS follow. This is what GitHub is all about: A central solution for a distributed version control (beyond many other things like an incredible social network for programmers).
Now, if we go for a slightly more complex deployment, with several sites collaborating, is it still easy to know where the source of truth is?

In this scenario, while there are two sites with their servers, it might be easy to propose the Cloud as the rendezvous point where all changesets and branches are pushed. It might ideally be the single source of truth.
Shared sources of truth
Now, what if we remove Cloud from the picture in the previous scenario? The result would be as follows:

Now, it is unclear which one is the leader and which one is the follower.
|
I’m using a multi-site naming convention, naming my servers as |
Of course, it can be immediately resolved by a company-wide agreement: Riga is the main server, everything must be pushed to Riga. This doesn’t happen often by consensus but due to historical reasons: The original site rules.
The alternative is shared ownership of the truth which can end up being a very good solution too: London and Riga can share the main versions, but there is probably no need for both to contain all the task branches created at each site. Each one can be the owner of certain repos. But let’s focus on a single one: How is it possible for them to collaborate without both sides being some perfect mirror of the other?
Look at the following diagram:

| time | London | Riga |
|---|---|---|
t0 |
The initial changeset was created on t-zero in |
|
t1 |
One developer starts working on |
First changeset of |
t2 |
Second changeset of
|
Second changeset of |
t3 |
|
|
t4 |
|
Changesets
|
t5 |
|
What you can see from the example is:
-
Rigais the main site where new versions are created. That’s whyLondonpushesmaintoRigaonce branches are merged. -
It is too complicated to create releases for the same repo at two sites for practical reasons: Versions could collide. I mean, it is doable with some coordination to create new version numbers. Still, it would probably be a little impractical (or at least a good topic worth further discussion).
-
Londonhas some branch testing in place to decide if a branch is ready to be merged.
I was super careful to merge branches in Riga only after the changes from London were received. This is not realistic, but I did it to keep the scenario simple. Do you see what would have happened otherwise? If new changes were on main in Riga in t2, for instance, then London would have required a pull and merge (and subbranch) before pushing. Not hard, but it would be more complex than the scenario I drew.
Now, what happens in London once a new version is created in Riga? It just needs to pull main:

There are a few interesting takeaways here:
-
The core repos at
LondonandRigaare equivalent, although they are not exact clones. I mean, the newly labeled changeset at both sites is a snapshot of the same project tree. You can create two workspaces, switch each to the same changeset on the two different repos, and they will contain the same content. -
But, the two repos are not exact clones because they do not contain the same branches.
task100andtask102are missing inRiga. Yes, their resulting changes are there inmain, but the branches are not there. Likewise,task103andtask104are not inLondon.
Our recommended option – single source of truth and not exact clones
I’ve introduced a couple of choices and the concept of different repos not having to be exact clones. Now I’m going to share what we think makes the most sense.
To me, the previous scenario would have been much simpler this way:

The workflow is not very simple:
-
Londonnever merges branches tomain. It can create as many task branches as needed, but they will be pushed toRigaonce they are finished (or as many times as required during the process, no need to delay the push until the task is completed). -
Finally, all branches are at
Rigaas if they were created there locally (Plastic always keeps track of where each changeset was created). The following screenshot shows a changeset in our repocodice@skullwhere its replication source (where it was pulled from) is a different server. As you can see, Plastic keeps track of that. Among other more important tracking issues, this info lets you color the changesets in the Branch Explorer depending on their origin.
-
Rigais the one doing all merges. It makes much sense because this way you have a CI system in place just monitoring the core repo atRiga. -
The decision to create a new version happens based on the info in
core@riga, which significantly simplifies things. Whether you are using a mergebot or triggering new versions manually, having this single source of truth makes things simpler. -
As the container of the entire project
Riga, is the key one to backup and protect in terms of data loss.
Let’s now see what happens to London once the new version is created: It can pull main from Riga to get the new version, and merges of the task100 and task102 branches. Notice how the other branches task103 and task104, do not need to be pulled from Riga at all, and the main branch will still be consistent and equivalent to main@core@riga.

This scenario I just described can happen in a multi-site situation like the one I also described before. But it will also be extremely common with developers working distributed in their repos. Let me explain:
-
As a project contributor, you pull
mainfromRiga. No need to download the complete history of the project. It would consume much more disk space and time. -
You will create as many branches as you want locally. Usually, they’ll be your task branches.
-
You will push your branches back to
Rigaas often as you need once you have finished your work. Most likely, you’ll mark your finished task branch with an attribute that will also be replicated toRiga. -
You’ll regularly pull
mainagain to get newer versions and start your new tasks from there. -
Finally, your repo will contain much fewer branches than
Riga, but that’s not an issue at all.
|
Something essential to keep in mind is that if your repo doesn’t have all the branches, it doesn’t have the entire merge tracking. What does this mean? Well, you are safe to merge between branches you created, but if your repo is incomplete in terms of history, it might get different merge results than if the merge is performed in |
Exact clones
What if you need to have two repos that are exact clones of each other? Is this achievable? And, I mean, identical clones, not just equivalent results, as I mentioned a few times above.
As soon as developers work concurrently on two repos, there is no guarantee to have them as exact clones all the time. They’ll eventually be consistent clones at the instant when all changesets are replicated to both sites, and concurrent changes are merged and the results of the merges propagated. See what I mean? If you can stop working on both sides and just allow work to resolve conflicts on branches, then eventually the repos will be exact clones. But, since development typically never stops, then this eventual consistency tends to be delayed. It is not a big problem, as long as you’re aware of it.
There is an easier way to get exact clones without dealing with concurrent changes: Keep one of the repos read-only except for replicas from the source repo. Suppose no actual development happens on the destination repo. In that case, you can guarantee that they are exact clones, at least until the changeset that was just replicated into the destination.
This is very good if you need a failover repo (or set of repos) on a different server that you can switch to if something goes wrong on the main one or use it as a backup.
Replicas can be fully automated without any manual intervention. If development happens at both repos, then there will be chances of manual conflict resolution during merges. On the other hand, if changes only happen on one side, there will never be a need for manual intervention, and replicas can be easily scripted. The replicas can be launched by a trigger each time a new changeset is created on the source repo, or periodically every few minutes or hours, depending on your needs.
Partial replicas
All replicas in Plastic are partial. When you replicate a branch in Plastic, you replicate just this branch, not the entire repo, unless you loop through all of them or create a sync view and push/pull the entire branch list.
Look at the following example:

I can pull only task104 to my local repo. There might be hundreds of branches in the central repo at Riga, but I’m only interested in branch task104. After pulling, I get a single changeset. Still, it is fully functional. It contains an entire copy of the working tree, so I can continue working from there to create more changesets and even new branches, as the diagram above shows.
And, even more important: you can push both task104 and task105 back to Riga (or any other repo) if needed.
Replica in Plastic vs. Git
I like to compare the things that work differently in Plastic than Git since many of you will very likely have a Git background when you try Plastic.
The replication process works differently in Git than in Plastic. And these partial replicas are one of the key differences.
Let’s go with a new example, this way checking two identical repos, in Plastic and Git:

|
Note for gurus
Notice how in Plastic, every single changeset belongs to a branch. So there is a one-to-one relationship between cset and branch. While in Git, branches are just pointers, and then a commit can be in more than one branch at a time. |
So, what happens in each system when you decide to pull the task029 branch?
In Plastic, the two repos involved will negotiate which changesets need to be pulled: Only the cset in task029 will be selected. Of course, it doesn’t mean only the files that were checkin in this cset will be downloaded, but I’ll cover that later.
In Git, a tree walk operation will happen. Considering the topology of the graph I drew, the commits marked in green will be downloaded:

In this case, Git would download the full repo with all the changes. This is because the tree walk goes first to master, then the head of the master branch has two parents, so the tree walk will walk on both paths.
Of course, in Git, there are ways to limit depth, so you don’t end up pulling the entire repo if you don’t want to. But, when you limit depth, then there might be restrictions trying to push new commits back.
I wouldn’t honestly say any of the alternatives is better than the other. Of course, I’m biased towards our design decision for obvious reasons, but it is important to highlight the difference.
The dual lives of changesets
Changesets play a double role: They track the actual changes you checkin, and are also a complete snapshot of the entire repo at the instant of the checkin.
This is important for you to understand partial replicas.
As usual, I will use a concrete example and a bunch of pictures to explain it.

The changesets in the diagram are decorated with the actual changes.
-
First, I added three files to the repo.
-
Then, I made a bunch of changes to
foo.cboth intask001andmain. -
Later, I merged
task001tomain. -
And finally, I branched off
task002and modifiedfoo.hfor the first time.
This explains what each changeset contains in terms of changes. But what are the actual trees they point to?
This is the tree for changeset 1, the one adding the three files. As you can see, the changeset points to a specific revision of the root directory, which points to the rest of the revisions of the directories and files it contains.

Now, the changeset 2 in branch task001 modifies foo.c. This is what its tree looks like:

This is how it works:
-
foo.cis modified, so it goes from revision1to7. -
But, to link to the new revision, directory
srcneeds to go from5to8. A new revision of the directory is created. -
Interestingly,
src revision 8points tofoo.c revision 7, but still points tomk revision 4since themk directorysubtree didn’t change. This is the actual magic that avoids recreating the entire tree on every single change. -
Going up in the tree, we need to create a new revision of
/to point to the new revision ofsrc. Of course, theincsubtree is not modified so/ revision 9links the previousinc revision 3.
In the figure above, green indicates the revisions created in changeset 1, dark grey shows the revisions linked to tree 2 but were not created there.Finally, light grey indicates the revisions that are no longer pointed by changeset 2.
|
No drama
I know this is not the most obvious concept in the book. You’re probably thinking, this guy is trying to drive me crazy. I digress! It is way much simpler than anything you do daily as a programmer or designer! 🙂 |
|
Key takeaway
Understanding how changesets work will turn you into a master of version control. So, I believe this is 10 minutes well invested 😉. |
The following graphic shows the trees of the next changesets: 3, 4, 5, and 6. Instead of drawing crossed lines all around, I just drew the references to the pre-existing subtrees in every new changeset tree.

|
Revision numbers
Every single element (we call it an item) controlled by Plastic can be identified by the path inside its changeset, but it also has a unique revision number. Of course, the same revision number can be in many different changesets. This is the case of |
Now, let’s go back to the replication scenario. When you pull task002, you won’t be just obtaining foo.h, but the entire tree changeset 6 points to. It is an entire snapshot of the project, so it is fully operational.

If you pull task002 you won’t get the entire history of foo.h, foo.c, and the rest of files. Instead, you’ll get the actual revision required to load the tree of changeset 6.
In contrast, if you replicate main, you’ll be replicating all the changesets in the branch: 0, 1, 4, and 5, and with them will come all the individual trees of these changesets, and a good part of the history of the files involved (excluding the changes made in task001, unless you decide to replicate that branch too).
A trick to replicate just a single changeset from main
Partial replicas allow us to replicate just one branch. But what if you want to replicate one changeset of a branch and not the entire history? As you saw in the previous topic, it is technically possible.
When writing this, we didn’t have an interface to replicate only changeset 4 of main. This is not because of any technical restriction, we could easily do it, but we didn’t add a way to specify just a single changeset in a pull.

Until we implement that, there is a trick you can use. Suppose you want to replicate changeset 4 (and, of course, its entire working tree) instead of the entire main branch. Just create a branch from4 as I did in the diagram, and replicate it. You’ll get just the cset 4 replicated to your new repo.
Why is this useful? In our case, our main repo has been evolving since 2006. So, if I want to replicate main to my laptop, I’ll be downloading a good number of gigabytes. That’s not a problem at all, but suppose I want to save a bunch of gigs because my SSD is running out of space. Even if the repo is large, the working copy in the main head is just 500 megs or so. So, I find it very useful to have the option to replicate just the equivalent of a working copy and be able to evolve from there locally, instead of having to download the whole history of the main branch.
I can always connect to the central repo to browse the entire history, while my local stays tiny.
Merge history and partial replicas
Like we mentioned while talking about "sources of truth," we must be careful when running certain merges on a partially replicated repo. This is because some missing merge history might alter the final merge result in the partial replica.
It is easier seen with an example:

If you merge bug199 to main at Riga, the common ancestor for the merge will be the changeset marked as B in green, which is the correct one.
Now, suppose you only pull bug199 in your local repo and try to merge to main locally. The common ancestor will be changeset A, marked in red. The merge result will be different (possibly more conflicts) than if run in Riga.
That’s another reason why we prefer to do the merges on the central site.
Of course, you are free to merge locally between branches with a simpler hierarchy that you know you own entirely, like a child branch you created in your repo.
Xlinks with distributed repos
When you create an Xlink, there is an option in all GUIs and command line to specify if you want the Xlink to be relative to the server.
If the relative server is set, it means that if /src/linked at repo core@london points to / at cset 58080ec0 at repo comps@london, if you replicate core to core@local, it will expect comps@local to exist too.

When you use relative server Xlinks, remember to replicate the branches in the comps repo and the ones in the core repo. Otherwise, the tree of the changeset will fail to resolve when you try to switch to it.

Finally, the other option is to use absolute server Xlinks, which means you want the xlinked tree to be obtained from the original server.

It is a good option too, but of course, it means you always have access to the comps@london repo (so your internet connection must be available) while working on core@local.
Branching
Branches are central to Plastic. We already covered how essential task branches are from a workflow point of view.
In this chapter, we will be more technical about what happens behind the scenes when you create a branch in Plastic.
Every repository starts with a main branch
Each new repository you create in Plastic comes with a default branch called main. The main branch comes with a cset 0 that is just an empty changeset that contains the first revision of the root item / of the repo.

You can rename the main branch if you want, although most teams keep it and use it as a convention for the principal location to contain new versions.
Every changeset belongs to a branch
Even if you decide to skip branching entirely, you’ll be using at least one branch since every checkin creates a changeset that belongs to a branch.
Every changeset has an associated task: Branches in Plastic are changeset containers.

As you can see, all four changesets in the figure belong to the branch main.
Creating branches is cheap
Look at the following figure:

Imagine I added 300k files to the repo in changeset 1 (three hundred thousand files). The cost of the two branch alternatives in the figure is the same.
The only difference is the few extra bytes of metadata required for the branch object (name, owner, date, etc.). So, creating a new branch is just adding a new light object to the metadata of the repo.
A branch is not a copy of the entire directory structure, nor a special directory like it was in the days of Subversion or Perforce.
As you can see in the figure, every changeset points to its parent. This means it inherits everything and adds its changes to the tree. So, suppose you modified three files in changeset 3. In that case, this is the actual cost of the changeset, independently of whether it was created on branch main or main/task001.
Every changeset points to a given revision of the root directory to create a snapshot of the repo. But, none of these trees are full copies. Instead, they are created incrementally, starting from the previous tree and reusing most of it. For more information about how these snapshots work, see the section "The dual lives of changesets".
Branches have their own metadata
Unlike what happens in other version control systems, like Git, branches in Plastic are complete entities, not just pointers.
This means every branch is decorated with specific metadata:
-
Creation date
-
Creator
-
GUID
-
Comments: Every branch can have a description, which is very useful to complement the name.
-
Attributes: You can assign value-pair combinations to a branch. A typical use case is setting a status: resolved, open, merged, failed.
Branch hierarchies
Child branches
Whenever you create a new branch, it is by default created as a child of the one it starts from.

In this case, main/task001 is still empty (and it points to the same tree as changeset 2) since it doesn’t contain any changesets. Its name says that task001 is a child of main. This is because branch objects in Plastic have a parent field pointing to the branch they are child of.
Thanks to this relationship, it is possible to create entire branch hierarchies:

Branch hierarchies are a way to introduce a namespace structure in your branches. They don’t have any other impact other than keeping the branch structure better organized.
Top level branches
In every repo, there is at least one top-level branch: main. But, you can create as many top-level branches as you need. In fact, from a practical perspective, both child and top-level branches have the same behavior.
The following figure shows all branches created as top-level ones.

|
I drew the branch name in many diagrams in the book, not the full name, including its parent. I mean, to keep the diagrams less verbose, I normally named branches as |
A meaningful branch hierarchy
As I explained above, it is up to you to use top-level or child branches. Their only impact will be how you name the branches and how it is easier to manage your project.
Let me propose a strategy that I find useful: Keep top-level branches for structure branches and child branches for tasks and bug fixes.
Take a look at the following diagram. First, we have the main branch with several task branches. Then, a fix-3.0 that can be a maintenance branch to evolve an older release, and it also has its own set of child branches.

One of the advantages of defining a strict structure of top-level and child branches is that you can filter by level in the Branch Explorer in the Plastic GUI, and then easily focus on the structural view, by filtering out all second-level branches as follows:

This simplification helps you focus on the repo structure by hiding more tactical short-lived branches.
Subbranches
Plastic can also manage branches inside branches. In reality, the changeset structure is the one creating the actual trees of divergent history. With that in mind, it is perfectly possible to have something like the following:

Changesets C1, C2, and C3 all belong to main, so they are a branch inside a branch.
To learn more about subbranches, see "Handling concurrent changes on replicated repos". When creating subbranches, you typically need to make concurrent changes on the same branch in replicated repos.
Delete empty branches only
Branches can only be deleted when they are empty. This means that if you want to delete a branch, you have to delete its changesets first. A changeset can only be deleted if it doesn’t have any descendants (children or linked by merges).
Consider the following scenario: If you want to delete main/t124, you’ll need to delete its two changesets first. But, to delete changeset D, you’ll need first to remove A, B, and C, to get rid of all its descendants.

Yes, Plastic branches are admittedly hard to kill.
But, in our opinion, the question is: why would you want to delete a branch?
The answer is obvious for users coming from Git: Deleting branches is a common technique; you need to clean out old branches to keep the repo usable. But, that’s not the case in Plastic. If you want to learn more about why we don’t delete branches, please check "We don’t delete task branches".
Changesets can be moved to a different branch
Changesets belong to a branch, but they can be moved under certain circumstances.
A typical example is that you accidentally checkin changes to main instead of the right task branch because you forgot to create the branch and switch to it.
It is possible to fix the issue and move the changesets to the new branch:

Learn more about how to move changesets.
Diff branches
Branches are changeset containers meant to hold parallel project evolution until divergent lines of evolution converge.
But, besides being containers and tenants of project hierarchies, branches also exist to be diffed.
This is very important to highlight because many users tend to think only about changeset diffing and not full branch diffing.
What happens when you diff a branch? In the example below, diffing task120 is the equivalent of diffing changesets C3 and B.

Diff (task120) = Diff(B, C3) = changes made in C1 + C2 + C3
The important thing to remember is that Plastic branches know where their starting point is, so when you diff a branch, Plastic knows the boundaries of the changesets it contains.
Git users need to do this arithmetic themselves since the system doesn’t track the origin of the branches.
Learn more about "diff math".
Merge and conflict resolution
Merging is the ultimate practice of version control. Master it and you will become a version control expert.
This chapter contains everything you need to get a deep, complete understanding of the craft of merging. Pay attention to the details!
Pay attention to the details because you are going to walk the arcane paths of merge mastery.
Merge defined
Before diving into the details, I will share the basics of a merge is and its use.
Born to merge
Branches are created to be merged. However, only a small number of them stay independent, creating parallel dimensions of unmerged code.
Merge from a branch
Merge is the operation to incorporate the changes made in a branch into a different one.
In the figure, to incorporate the changes A, B, and C done in bug-2001 into main, you need to merge bug-2001 to main.

The result will be something as follows:

Where the resulting changeset R contains the changes made in A+B+C and puts them in main.
The merge from a branch is technically equivalent to the merge from a subbranch since the same logic applies:

Merge from a changeset
Merge is also the operation to merge from a given changeset instead of taking an entire branch.

If you merge from changeset B into main, you’ll be getting the changes made in B and A but skipping C.
Merging bug-2001 is equivalent to merging C (the head of the branch).
There are ways to merge only the changes made in a changeset and not the ones in their parents. This is called cherry pick and we’ll be covering it in detail in this chapter.
Merge contributors
Repositories are graphs of changesets
All through the book, you have seen a massive number of repository graphs. It is the same graphic Plastic renders in the Branch Explorer. It is a representation of the repository evolution through time. The history of the changesets and their branches, how they evolve, diverge, and converge again.
Each time you checkin, you add a new node to the graph:
The arrow direction shows a "is parent of relationship". This way, 0 is the parent of 1. And 2 is the parent of 3. They might belong to the same branch or different ones, but the important thing is the child to parent links between them.

Finally, the merge links indicate the other type of relationship: Source to the result of a merge.

If we remove the branch decorators, what is left is a typical graph with a single root (changeset 0) and then nodes that diverge in branches and converge again with merges.

This graph is essential for users to understand the repo history, but it is also the fundamental data structure that Plastic SCM uses to resolve merges.
Arrow direction
Now, I’ll explain why arrows in the Branch Explorer diagram are rendered the way they are.
We always say the Plastic changeset structure is a DAG: Directed Acyclic Graph. Acyclic? It is full of cycles, thanks to the merge links! Well, visually, yes, but internally for merge tracking calculation purposes, all links go backward.
This is how Plastic walks the tree from 5 back to changeset 0.

The first path is obvious. Simply back from 5 to 2 thanks to the parent link, then back in a straight line to 0.
The second path goes walking back the merge link from 5 to 4, then back.
Why is it then that the merge link is displayed this way? If everything is heading back, why is the merge link the only one going in the wrong direction and creating a cycle?

As I said above, merge links are always walked backward. Always. From result to source. They are never walked in the direction they point to.
Why do we keep them this way?
Well, when we talk about a merge, we typically say: merge changeset 4 to main. We talk about a merge as from a branch or changeset to a destination branch or changeset. That’s why we always considered it very natural to render merges this way.
Of course, there are other possible options, as the following diagram shows:



Should we change how we render the Branch Explorer to option 1 or 2? I think it is worthwhile to understand why everything is rendered the way it is.
|
Customization
It is possible to render the Branch Explorer like in option 1 by setting a given flag in the configuration file. |
Merge contributors: source, destination and base
Every merge has 3 contributors: The source, the destination, and the base or common ancestor.
Check the following figure:

If you want to merge from bug2061 to main, then the contributors are as follows:
| Source |
Where you are merging from. In this case, the changeset marked as S. It is also known as "theirs". |
| Destination |
Where you want to put the result of the merge. Marked as D in the diagram. It is also known as "yours" since this is typically where your workspace is when you merge. |
| Base |
The common ancestor of the other two contributors. If you walk the graph back from D and S, B is the first node they have in common. |
Once the merge has started, the resulting graph will look as follows:

Note how I used dashed lines for the result, the merge link pointing to it, and the line connecting the result with its parent, the destination. This is how we draw in-progress merges. Once the changeset resulting from the merge is checked in, the lines will be uniform and not dashed.
If you decide to merge from main down to main/bug2061, the contributors will be slightly different:

The base would remain intact, but source and destination would be switched. The Result is always a destination child, so it would now belong to main/bug2061 instead.
The cases above are considered the canonical ones where the source and base are separated by at least one changeset.
Let’s see a new scenario:

In this case, you want to merge from main/bug2061 into main, but there weren’t new changes in main after bug2061 branched off. Then, what happens is that the same changeset is simultaneously base and destination. This is typical when you create a couple of branches and then merge the first one back to main. There is no possible conflict because the actual topology of the merge says no concurrent changes exist.
Plastic always creates a changeset as result of the merge
It is essential to note that Plastic always creates a changeset as a result of a merge.
I highlight this because this is radically different than what happens in Git. Since many of you are familiar with Git prior to your jump to Plastic, understanding the difference is worthwhile.
The first scenario is where the destination and the base are not the same changeset/commit. This is a case where conflicts might potentially happen. As you see in the figure, Plastic and Git behave in the same way. Both create a result changeset that reflects what happened.

The second scenario happens when base and destination are the same changeset/commit. In other words, if no possible conflicts can occur due to the repo topology:

Here Git performs a fast-forward. There are no possible conflicts, so it moves the master to the same commit where bug2061 is. It is quite efficient because new commits are not created. The drawback is that the history of the branch is lost, and you can’t figure out anymore which commits were created as part of bug2061 and which ones as part of main.
In Plastic, we always create a result changeset. This is because a changeset can’t be in more than one branch at the same time, and also because it is crucial for us to properly preserve the branch history.
Graphs with potential merge conflicts
As you saw in the previous section, there are cases where there are no possible conflicts. For example, suppose the base and the destination are the same changeset. In that case, all Plastic has to do is add the correct files to the resulting changeset since no possible conflicts can happen.
The other scenario is when the shape of the graph tells us that there are potential conflicts. I say potentially because, more often than not, there might not be possible conflicts even when the graph has concurrent changes. Let me show you why:

In the figure, you see how in main/bug2061 only inc.c was modified while in main after bug2061 was branched, only foo.c was changed. This means that while, at first sight, there might be potential conflicts in the graph because there are concurrent changes, in reality, no files were changed concurrently.
The same graph topology can lead to conflicts when concurrent changes on the same file happen, as the branch bug3001 shows in the following figure:

Here bar.c was changed both in source and destination, which provokes a file conflict. The conflict can still be automatically solved, as we’ll see in the 3-way merge, but there will be cases where manual user intervention will be necessary.
2-way vs. 3-way merge
Before we jump into how merge tracking works and why it is so useful, I think it is good to cover the difference between 2-way and 3-way merge.
As you will see in a moment, merge tracking is all about finding a "common ancestor". We already saw how every merge is about finding 3 elements: The base, the source, and the destination. Now, why is this base thing so important?
The answer lies in the difference between 2 and 3-way merge.
2-way merge: life before common ancestors
Look at the following case:

Did you delete line 70, or did I add it?
There is no way to know looking at the two files. Only our knowledge of the actual file would tell.
This is a 2-way merge; you merge 2 files by comparing one to the other.
As you can see, there is no way to merge files with a 2-way merge without manual intervention. Conflict resolution can’t be automated at all.
This is how old version control systems (namely SVN, CVS and several others) used to work, and that’s the primary reason why an entire generation of programmers all around the world developed "merge phobia". Can you imagine having to merge 300 files when all merges need mandatory user intervention, even if changes were trivial?
That’s what a world without common ancestors would look like 🙂.
3-way merge
Let’s forget about version control for a second. Let’s focus on manually solving a conflict like the one in the previous example. How can anyone solve a merge conflict without having previous knowledge about the project?
They would need to check what the file looked like before the two contributor made changes.
This "how the file was" is what we call the base. If we use it to solve the conflict, then the scenario will be as follows:

As you can see, the conflicting line 70 already had the content Print(result); initially. So, it is clear that it was deleted on source (yours) and untouched on destination (mine). The conflict can be automatically resolved now; all we need to do is keep the deleted line.
This is the magic of 3-way merge. Most of the actual file conflicts will be automatically resolved using very simple logic: If you modified one line and I didn’t touch it, then yours is the one to keep.
The good thing here is that 3-way merge can solve many conflicts in a single file. Let’s see another example: This time, both lines 30 and 70 enter the scenario. First, one user modified line 30 while at the same time the other deleted line 70. Still, a 3-way merge tool can merge the file without manual intervention. The figure shows the base and the two contributors and then the result.
As you can see, applying very simple logic, it is possible to conclude that we must keep line 30 from the destination (marked in green in the result to highlight the chosen contributor). Line 70 must be kept from source like in the previous example. The result marks the deleted line in blue to reflect the contributor it is coming from.

Now imagine you have to merge from a branch where 300 files were changed while the same 300 files were also modified in the destination branch. Thanks to a 3-way merge, the merge most likely won’t require manual intervention because the very simple logic behind the text merge algorithm will be able to solve all conflicts automatically.
The actual logic to automatically solve conflicts can be summarized as follows:
| Source (yours) | Base (common ancestor) | Destination (mine) | Result |
|---|---|---|---|
A |
A |
B |
B |
B |
A |
A |
B |
B |
A |
B |
B |
B |
A |
C |
Manual conflict |
Now, what if two developers modify the same line divergently in two different ways? Check the following figure where the two developers modified the for loop differently. It was from 1 to 20 initially, but then one decided to set it as 1 to 15 while the other changed to 1 to 25.
The merge tool doesn’t know what to do in this situation and will ask for human intervention. This is what we call a manual conflict.

As you can see, the key is to have a base or common ancestor to run 3-way merges. Otherwise, all merges would be manual.
All the links and arrows in every single diagram in the book have a key purpose: Provide the merge algorithm with the information it needs to find the common ancestor between any two nodes in the graph. This is the way to find the right base for every single file involved in a merge.
Layout of 3-way merge tools
Are you familiar with any of these tools? Kdiff3, p4merge, BeyondCompare, WinMerge? They are all merge tools. Plastic comes with its own 3-way merge tool, called Xmerge, and we think it is much better than all the others. But my point here is not to sell you the merits of our tool, but to explain what they all have in common.
As you saw in the examples above, when you do a 3-way merge, you need to handle the source (the changes you are merging from), the destination (your copy), and the base (how the file was before any of the changes). The drawings in the previous sections showed a very typical layout. It is, in fact, the one we use:

An alternative one, used by many merge tools, unified the result/destination as follows:

I prefer the first option (I mean, that’s the one we use after all), but you need to keep in mind that there are two main alternatives. Once you know that, no merge tool will be difficult for you. They might have more or fewer buttons, a simpler or more cluttered UI, but once you know the key elements in any tool, it is just a matter of just finding what you are looking for.
Merge tracking
All the arrows and nodes I drew so far in the book have a dual purpose: First, explain how your repo evolved to you, the developer. The other is to resolve merges.
This second part is what the Plastic core cares about.
Whenever you launch a merge, the first thing Plastic has to do is identify the three contributors of the merge. Two of them are obvious because you specify them: The source and the destination.
Merge tracking is all about calculating the correct common ancestor or base.
Calculating the common ancestor
To find the common ancestor of two given changesets, the Plastic server takes the changeset graph (the same structure you see in the Branch Explorer) and walks back the tree until the paths meet.
As usual, it is much easier with an example:

The algorithm starts two walks from D and S, and their paths collide first on B, which is the base or common ancestor.
The base for the merge is the nearest common ancestor because, in the example, the changeset 131 is also a valid common ancestor, but it is not the closest to the two contributors.
Of course, life is not always that simple. Finding the common ancestor is not that obvious as in the previous example. Check the following figure:

Note that the case is not super difficult either, but as you can see, you have to walk through several branches before finding the changeset marked as B. It is a pretty obvious case, though, exactly like the first one but with a longer tree walk to reach the base.
What makes merge tracking slightly more complicated is that every new merge is affected by the previous merge history (merge history is equivalent to merge tracking, so you can also use it interchangeably).
Try to find the common ancestor in the following figure: (don’t go to the solution until you make a guess 😉)

I want to merge branch bug3001 into task701, so Plastic will walk back from S and D and consider the merge arrows as traversable paths. So, the result will be as follows:

Yes, changeset 134 is the actual common ancestor, thanks to the merge link. Otherwise, it would have been 131.
All these cases I have described so far are pretty simple, and this is how most typical merges will be most of the time. However, there will be situations when more than one common ancestor will be found at the same distance. And then, recursive merges will enter the scene. But, before going any deeper into merge tracking, let’s discover what happens once the right common ancestor is found.
Merging trees
We’ve arrived at the core of the merge process! You are about to become a master in the internals of merge, and understand how Plastic merges branches. Armed with this understanding, you will no longer have trouble understanding even the more complex merges.
Of course, we are going to start with a branching diagram:

We want to merge bug3001 into main. The common ancestor is already located, and the diagram is decorated with the actual changes.
To calculate the merge, Plastic doesn’t load all the individual diffs made in 3 and 4 and then destination and source. It doesn’t accumulate the changes to find the solution. (This is not a bad alternative and some systems like Darcs do something similar, but we do it differently).
What Plastic does is load the tree at base, source, and destination and then calculate the diffs between source and base, then destination and base and work based on that.
Let’s go step-by-step. First, I’m going to create the tree for changeset 1:

The numbers are the revision ids. Every object in Plastic has an object id, which is an int (4 bytes). It is also identified by a GUID that makes it unique even across replicated repos. I will use the revision id (revid for short) but the example would also work with GUIDs.
It is also important to note that every file or directory also has an item identifier (item id). This means bar.h might have many different revisions, but they all belong to a given item id.
Now, let’s go to changeset number 2, the base, where we only changed /src/bar.c. This is what its tree looks like:

I marked in green the nodes that were modified from the previous changeset 1. As you can see, there is a new revision for bar.c, then for its containing directory src/ and then the root /. The rest of the tree remains unchanged.
For the sake of clarity, I drew all the trees in the example:

I think this graphic gives you a pretty good explanation of how Plastic works. Of course, it is very good to understand merge, which is our goal now.
As I said, to figure out the actual changes since the base Plastic doesn’t load all the trees, it just loads the base, source, and destination.
Once the trees are loaded, Plastic first calculates the diff between the base and destination trees. It will be something as follows:

The merge code walks the two trees as follows:
-
Roots are different.
revid 9 != revid 18. So, continue walking. -
Take
inc/. revid 4 == revid 4in both trees. Diff can prune theinc/subtree. -
src/ revid 8 != revid 17. Continue walking. -
Then, it finds that both
bar.candfoo.cdiffer, so both will be marked as different.
Diff(base, destination) = changed /src/bar.c and /src/foo.c
Now, the differences between base and source:

Here:
Diff(base, source) = added /inc/foo.c and changed /src/bar.c
Now, the algorithm takes the two pairs of differences to find conflicts. It can mount a result tree like the following:

As you can see, it can already mount /inc/foo.h in the tree, and it knows it has to load /src/foo.c revid 10. But, there is a conflict in bar.c because concurrent changes happened on both contributors.
Let’s now put the three trees together:

To solve the conflict in bar.c, we’ll need to run a 3-way merge loading revid 7 as base, 13 as src, and 16 as dst.
And this is how everything comes together! Find the common ancestor to locate what changed in the two contributors and then locate the files' common ancestors in conflict 🙂.
I don’t think I’ve ever drawn so many graphics before in my life 😃!
If you went through all this and got it, now you can say you are an expert in merging. Congratulations!
Changeset-based merge tracking
Merge tracking happens at the changeset level, not the file level.
When Plastic tries to find the common ancestor of a merge, it does it on a tree-wide level.
I’m going to explain what this exactly means and the implications it has.
Consider the following scenario:
You only want to merge /src/bar.c to main, but skip the others because you are not interested in them for whatever reason. Plastic can’t do that but suppose for a moment that you manage to make it happen.
Now, you’ll have a resulting changeset where only bar.c was merged from bug3001 and a merge link set, as follows:
And finally, you want to get foo.c and foo.h into main. You try to repeat the merge but the merge link between source and destination clearly says the merge is impossible because there is a direct path between them (source is a parent of destination, so no merge can happen).
Do you see the problem now? That’s why when you merge a branch or changeset, you merge all or nothing because otherwise, we’d render the merge links useless.
|
We are considering one alternative to give users more flexibility, which is allowing the first merge to happen but without setting the merge link. Maybe we can set some informative link so you visually know something happened (although the algorithm will ignore it to find ancestors). Then, the next time you want to merge, you’ll be able to complete the operation. |
The alternative to this is per-item (per file, per directory) merge tracking. Plastic and Git (and any modern version control) uses per-changeset, but SVN, Perforce, TFS, and the now-archaic Clearcase, use per-item merge tracking. We used per-item before version 4.0.
What are the cons of per-item?
-
Speed. When you have a tree with, let’s say, 300k files, you have 300k different merge trees, one per file and directory. You can optimize the calculation as much as possible, but believe me, it will never be as quick as simply having to traverse one single merge tracking tree.
-
Conflict resolution. With changeset-oriented merge tracking, you merge trees. Fixed trees associate with changesets. This enables solving several directory conflicts that were simply impossible by the per-item merge tracking. We’re going to navigate directory conflicts soon, and you’ll find out why they are useful to have in your toolbelt.
Why merge tracking matters
Merge tracking can save tons of manual work by automating merges that otherwise would require manual intervention. We already saw it with some simple 3-way merges. Now, I’m going to walk you through a very interesting case where you’ll discover why having proper merge tracking makes a huge difference.
Let’s start with this scenario:
We want to merge fix-7.0 back to main, and there is a conflict on /src/bar.c.
Let’s take a look at the actual files and solve the conflict:
Look at the figure carefully:
-
Line 30 was only modified on destination, so the
Print("hello");is kept. -
Line 70 was deleted on source, so the deletion will be kept too.
-
The problem is in line 51 because it was changed divergently. Manual intervention is required, and then we decide to keep it as
for i=1 to 33. We didn’t keep any of the contributors. We just decided to modify the result manually.
Then, we continue working on our project, making a few more changes as follows:
And now, we want to merge bug3001 into task701. The common ancestor will be changeset 104 (the old source this time). Let’s zoom into the file contents to solve the possible conflicts:
What happened is that in task701, line 51 was modified to be 1 to 45. Meanwhile, in branch bug3001, line 70 was added with content Print(result++);.
The result of the merge can be solved automatically by a 3-way merge tool.
Well, you may say, this is pretty normal. The 2 branches don’t touch the same line, so why should it be manual?
Let’s take a look at how the merge would be if we ignore the merge link between 104 and 105:
Not only is the merge not automatic anymore, but you have two manual conflicts instead of one!
Take your time to look closely at the figure and understand why there are manual conflicts now. It will really pay off.
Recursive merge - intro
In this chapter, we always had two contributors (source and destination) and one common ancestor in all the examples. All the trouble was finding the ancestor, but the only difficulty was walking the tree a little bit further. Of course, the ancestor could be harder to find in a forest of branches, but it wouldn’t be that hard for an algorithm.
Now, what if there is more than one ancestor found at the same distance? Let’s see an example:

We call this a crisscross merge scenario. The case itself is forced because there is no good reason to merge from 11 to 16 when 15 already exists. But, as you can imagine, this could happen in a distributed scenario where the merge 11 to 16 happens on a repo where 11 is the head of main. In contrast, 12-15 happens on a different one where only 12 was pushed at the time.
Anyway, the scenario in the figure is the shortest one driving to a merge with multiple ancestors, but the same can happen with several changesets and branches between the "crossed" merges, as we’ll see later.
As you can see in the figure, both changesets 11 and 12 are valid nearest common ancestors because they are both at the same distance from 16 and 15. So which one should we choose?
The answer is not choosing one because a random choice will lead to incorrect merges, but running a recursive merge where a new unique virtual common ancestor is calculated.
The figure shows the new virtual ancestor that Plastic creates by merging changesets 11 and 12. Then its resulting tree is used as ancestor of 15 and 16 to resolve the merge.

Plastic does all this operation under the hood when it finds multiple ancestors, so normally you are not even aware of what is going on and the merge simply happens correctly.
There is some effect you can notice, though. Suppose a file foo.c is modified by 11 and 12, so it needs to be merged, and there are manual conflicts. Plastic will ask you to solve those conflicts to use the resulting file as the basis for the next merge. Then, if the file was again modified in 15 and 16, you could have to solve a manual conflict again. The effect is that you’ll see the merge tool show up twice for the same file. Now you understand why it can happen 🙂.
Recursive merge – more than 2 ancestors
Once the basics of recursive merge are clear, let’s jump into a more complex case, where more than two ancestors are found at the same distance.
Take a look at the following figure:

As you see, now we have three ancestors at the same distance: 11, 12, and 13. So how does Plastic solve this issue?
It will chain virtual ancestors, merging them in pairs recursively (that’s where the name comes from) until only one is left. This final virtual ancestor is then used to solve the original merge.
The next figure explains ancestors V1 and V2 are created and V2 is used as the common ancestor for 16 and 17.

Now, you have a perfect understanding of how Plastic solves even complex merge situations. Admittedly, you won’t be facing recursive merges very often. Still, it is good to have a proper understanding of what is going on when they happen.
A last note: Do you remember the entire explanation in "Merging trees"? In essence, Plastic is merging three trees, and that’s why a solution like the one described here is possible. The "tree merge" code takes three trees and then produces a result. All we have to do is give it a different tree, in this case, a virtual one, so it can operate and create a meaningful result.
Recursive merge – why it is better than just choosing one ancestor
You might be wondering: "Why all this trouble and complexity instead of just picking one of the possible ancestors to solve the merge"? Ok, let’s see why with an example.
In the following scenario, there are two possible common ancestors at the same distance of contributors 6 and 7. As you can see, this scenario is not a crisscross. Instead, it is a more realistic one, but multiple ancestors at the same distance are found again.

First, let’s explore what happens if we randomly choose changeset 4 as common ancestor and perform the merge. By the way, I’m using the following image to introduce the file’s actual contents in the conflict in the example.

While delving into 3-way merge, we learned this would be a merge with manual conflict resolution since line 40 was modified differently by the two contributors. So, choosing 4 as a common ancestor will end up in a manual conflict.
Let’s now check what happens if we choose 3:

This time, the conflict would be automatic, and the result would be keeping the Print("See you"); sentence.
Which one is better? Without recursive merge, you have to rely on luck. Depending on what the algorithm does, it could pick 3 or 4. Then you can end up with conflicts or even with a wrong automatic resolution. I mean "luck" because there is no heuristic to actually make a better choice.
Now, let’s explore what recursive merge would do; it will merge ancestors 3 and 4 to create a new virtual one as the common ancestor for changesets 6 and 7. Ok, let’s go ahead:

As you can see, the virtual merge will be automatic; it will choose Print("Hello"); in line 40. No conflicts.
Let’s now use this result as the virtual ancestor for 6 and 7:

Now, it is clear that the merge is automatic again, and the final value for line 40 is Print("See you");.
Recursive merge can solve this conflict automatically in a consistent way, and the randomness of choosing one selector over the other is gone.
How important is this kind of resolution? Well, consider a real-world scenario with a few hundred files involved. Suppose your branch history leads to a multiple common ancestor scenario. You could potentially be saving tons of manual conflict resolutions by taking advantage of recursive merge 🙂.
Plastic merge terminology
When you merge branches or changesets in Plastic, you’ll often find a few names associated with the merged changes before you checkin. Things like "copied", "replaced" and so on. I’m going to explain each of them in this section.
Check the following figure:

-
bar.chas been modified on both branches, so it will require a merge. -
foo.his added inbug2061. -
foo.calready existed inmainand was only modified onbug2061, so there won’t be any conflicts. -
cc.hwas deleted inbug2061.
Now, once you merge, the files are marked as follows:
-
bar.c– merged – checkedout. This means the file was modified concurrently because it has changes in source and destination. This one is pretty trivial. -
foo.c– replaced. Remember the trees we saw in "Merging trees"? Well,foo.crevision in destination has to be replaced by the one in cset104(source) to create the result tree. No merge is needed, but there is a replacement of one revid by another one. That’s why we call it replaced. -
foo.h– copied. Added is surely a better description. We call it "copy" because the revid is copied from the tree of cset104to the result tree. -
cc.h– removed. The file is simply deleted from the result tree.
Directory merges
Directories are first-class citizens
Directories are first-class citizens in Plastic. This means they are versioned in the same way files are. Plastic can have empty directories because they are just not containers of files but entities on their own.
|
Git, in contrast, can’t have empty directories in the tree because directories are not versioned as such, they are just paths needed to host files, but nothing else. |
Here is a simple tree of a given changeset:

What does the actual data of revision 10 look like? Revision 10 belongs to a file named foo.c. Let’s see what its associated data looks like:

The image shows the contents of the associated blob plus its metadata. As you can see, this small fragment of text is not compressed, and since it is tiny, it is the segment zero (we split large files into compressed segments of 4MB each).
Now, what is the data of revision 11? This revision is a directory. So, what’s the actual data of a directory? You are about to see one of the key data structures that supports the Plastic merge power 😉.

Look at the image carefully. The data of a directory are the names (plus some metadata) of the files it contains. This has a profound implication on how Plastic works and merges directories. Files don’t have a name, they are not even "aware" of their name because directories hold the names. This is going to be key in how directory merges are handled.
Suppose we want to rename src/foo.c into src/boo.c. What will the resulting tree look like?

Exactly. When you rename boo.c, the revision of boo.c doesn’t change. What changes is its container src/. So, a new revision of src/ is created but not a new one of boo.c. src/ doesn’t know its name either, its parent (/ in this case) holds its name.
Let’s now see what happens if we decide to move /src/boo.c to /inc/boo.c:

Again, boo.c won’t change, only its source and destination directories will.
|
In Plastic, when we show the history of a file, we show its moves. We store some extra metadata with info about the moves to explain history to users. In reality, the history of a file doesn’t change when you move it to a different location because new revisions aren’t created for the file. |
Diffing moves
An essential part of merge calculation is diffing trees, as we saw in the previous sections. Here, I’d like to explain how moves are calculated between any two different trees and how the metadata helps find these moves.
Suppose we have a tree similar to the previous section, and we want to calculate the diffs between changesets 12 and 28.
The operations that happened in the changes between the two were a move of /src/boo.c to /inc/zoo.c and then a change in the new /inc/zoo.c. I describe the two operations in the figure for the sake of clarity. This doesn’t mean both happened in changeset 28. They could have happened somewhere in between the two.

When Plastic takes two trees to diff, it starts walking the destination and finds matches in the source. Destination is 28 and source is 12.
The actual result is as follows:

Basically, the diff finds that:
-
/inc/zoo.cwas added. -
/src/boo.cwas deleted.
The next phase in the diff is trying to pair added and deleted to find moves. In this case, the itemid matches, clearly a move between /src/boo.c and /inc/zoo.c.
Pay attention to the following: The revision ids don’t match. Since zoo.c was modified between the changeset 12 and 28, its revid is now 86 while it was revid 10 in the origin src/boo.c. So revid alone is not enough to match moves. That’s why Plastic uses an itemid to clearly identify elements.
The concept of the itemid is crucial in Plastic because it is key for move tracking. It is certainly costly to maintain, but the results pay off because merging moved files and directories becomes straightforward.
For instance, the same logic applies if, instead of moving a file, we move a directory to a different location:

As you can see in the figure, the diff finds /inc as deleted and then /src/inc as added but it can pair them as a move since they have the same itemid. I didn’t draw the children of the moved directory in the diff tree because there are no changes and the algorithm prunes the walk when there are no more differences. In this case, the diff is even simpler because the revids also match, but of course, it would work perfectly too if the revision id of the directory changed.
Merging moved files
All the hassle of dealing with itemids pays off to perfect merging moved files.
Moving files and directories are essential for refactoring. Not only that, in some programming languages, directories are directly associated with namespaces, and a change in a namespace can lead to tons of directory renames. It is also possible that restructuring a project is good for keeping the code clean, readable, searchable, and ultimately findable.
One approach is to postpone those changes until "we find a moment of calm with fewer concurrent changes". This never happens. The reality is that if you can’t refactor your code and directory structure while you continue with normal development, you never will. It is the same as postponing code reviews or any other key practices. You better have the practices and tools to do them daily, or you will postpone them indefinitely.
I hope I explained clearly how important it is to freely and safely move files around. That being said, let’s see a couple of scenarios in action.

The example in the figure is the canonical "merge a moved file" sample:
-
One developer modified
/boo.c -
While the other renamed it to
/zoo.cand then modified it
The merge result must keep the rename /zoo.c and combine the changes made by the two developers.
In the previous sections, we saw how Plastic diffs the trees to find actual conflicts and a valid common ancestor to merge them. As you now know, the actual names are not relevant for the algorithm since it can identify files and directories by itemid. That’s why this case is straightforward in Plastic; it can safely merge zoo.c because it knows it is the same item regardless of the names it has on both contributors.
Let’s now complicate the scenario a little bit by involving directories.

Let’s examine this second scenario:
-
The first developer modified
/src/foo.c -
The second developer moved and renamed
/srcto/core/render(moved inside/coreand then renamed it fromsrctorender) -
Then, they modified
/core/render/foo.c -
Finally, they renamed
foo.ctobar.c.
And again, as convoluted as the scenario might sound, Plastic only finds a conflict in /core/render/bar.c because it knows the two contributors modified the item. So, it will run a 3-way merge to resolve possible conflicts while keeping the directory and file moves in the result.
Change/delete conflict
Change/delete conflicts happen when someone modifies a file while someone else deletes it in parallel.
Since the new change can be significant, Plastic warns of the situation during the merge so the developer can decide whether the change should be preserved or discarded.
The simplest scenario is as follows:

-
Developer 1 modifies
/boo.c -
Developer 2 deletes
/boo.c.
Plastic warns of the case during the merge and lets you recover the change discarding the deletion if needed.
A more complex case involves a deeper directory structure and not-so-direct deletions. Look at the following figure:

-
One developer modified
/src/render/opengl/boo.c -
The other deleted
/render.
Plastic will detect a conflict and ask you what to do.
Of course, this type of conflict will only be detected if actual elements are in danger of being lost. I mean, consider the following case where we have a directory tree as follows:
.
\---src
\---render
+---opengl
| boo.c
| render.c
\---directx
render.cThen, the developer working on the branch named task does the following:
mv /src/render/opengl /src/opengl +
mv /src/render/directx /src/directx +
rm /src/renderIn this case, there won’t be a merge conflict since boo.c was "saved" during the moves done previous to the deletion of /src/render, so the changes made in main will be applied cleanly.
Add/move conflict
Add/move conflicts happen when you add a file or directory, and concurrently someone moves an existing file or directory to the exact location where you added the file. Again, Plastic will help you solve the conflict.

The example in the figure matches what I described before:
-
Developer on main adds
bar.c -
Meanwhile, the developer on task decides to move
foo.ctobar.c.
Here itemids come to the rescue. Plastic is not fooled by the fact that the files have the same name. It knows they are different files because they have different itemids. So, Plastic will ask you to keep one or the other or to keep both by renaming one of them.
I won’t describe a more complex case with directories because it will be the same as we just saw. Finally, a combination of files and directories where names collide is also possible (suppose the added bar.c was a directory), but the resolution will be the same as described above.
Move/delete conflict
Move/delete conflicts happen when you move a file or directory to a different location, and concurrently someone else deletes the destination directory. If not handled correctly, a merge of the concurrent changes could lead to valuable data loss.
Let’s see an example:

-
You move
/foo.cto/bar.c -
In parallel, your colleague deletes
/foo.cin a different branch.
When you merge his branch into yours, Plastic will warn you about the move/delete conflict and will let you go ahead and remove the file or keep the delete.
This type of conflict makes more sense when the scenario involves directories. Look at the following figure:

-
One developer decides to move
/sum.cinto the directory/core/utils/mathbecause he thinks the code makes more sense there. -
In parallel, someone did a cleanup and deleted the
utilsdirectory (possibly moving files outside to refactor the code structure, but of course not "saving"sum.cbecause it wasn’t inside/core/utilswhen they performed the cleanup).
When the branches get merged, Plastic will detect the move/delete conflict, warn you about the situation and let you decide whether you want to keep the delete and lose the moved file, or undo the deletion.
Suppose you undo the delete of /core/utils during the merge. In that case, chances are you will "restore" many other files and directories inside utils. But, they will stay in your workspace after the merge, and you will have the chance to delete again what you don’t need, but also to preserve sum.c which is what you wanted.
Evil twin conflict
Evil twin conflicts happen when two different items collide in the exact location. I don’t remember where the dramatic name of "evil" came from. Not sure if we took it from Clearcase, if we found it somewhere else or if we came up with it.
Anyway, the conflict is easy to understand with an example:

-
Developer 1 adds
/src/Sum.javain branchmain. -
Meanwhile, developer 2 also adds
/src/Sum.javain branchtask.
The merge will detect an evil twin conflict because the directory can’t have two items with the same name.
Plastic proposes these resolution options:
-
Rename
/src/Sum.javain destination (mainin this case) to a different name and preserve the two files. -
Keep the file coming from source, deleting the one that was already in destination.
-
Keep the file coming from destination, ignoring the one from source.
|
Do you miss a 2-way merge and unify history?
There could be a different possibility to solve this conflict: Somehow unifying the contents of We considered this option several times over the years, but never implemented it since the default action users normally take is to keep both because they realize they really wanted to have two different files and the name collision was not on purpose. We will keep an eye on this conflict resolution and eventually add a 2-way merge as a solution if users find it useful. As a temporary workaround, it is possible to keep the two files, use a merge tool capable of doing 2-way merge (like Kdiff3), merge them, then delete the file you don’t want before checkin. |
Moved evil twin conflict
A moved evil twin conflict happens when you move two files or directories to the same location in different branches, and you try to merge them. The directory can’t contain two items with the same name, and a conflict is raised.
Check the following example:

-
One developer decided to move
/core/perf/TimeTrack.csto/src/time/Timer.cs. -
Meanwhile, on a different branch, a different developer moved
/aux/Timer.csto/src/time/Timer.cs.
This scenario usually happens when similar functionality exists in two different places (like the case here).
In this type of conflict, Plastic provides three options:
-
Keep both files by renaming the one on destination,
mainin this case, to a different name. -
Keep only the one coming from the source, deleting the one in the destination.
-
Keep the one in destination ignoring the one on source.
As with regular evil twins, it could be interesting to do a 2-way merge if we know the files are the same although created separately. If you think this is something interesting, please let us know.
Divergent move conflict
This is my favorite merge conflict and the one I often use in demos because I think it demonstrates the strength of the Plastic merge engine.
As usual, let me explain it with a graphic:

-
One developer decides to rename
foo.ctoboo.c -
In a different branch
foo.cis renamed tobar.c
Plastic detects the conflict on merge and asks which name you want to keep.
Things can get more complex if we involve directories together with concurrent changes on a file:

-
Here first
/render/glwas moved to/render/opengl, and thenmesh.cppmodified -
In parallel
/render/glwas moved to/engine/ogland againmesh.cppmodified
Plastic will first ask you to decide where to put the gl directory. For example, do you want to rename it and keep it under engine? Or move it to /engine and rename it to ogl?
And, once the directory conflict is solved, Plastic will ask you to merge the mesh.cpp file.
Why do I like this type of conflict so much? Well, because it turns a complex (although obvious) scenario into something fully manageable while other version control systems (Git among them) will turn this into a complete nightmare. What Git does is duplicate the directory and all its contents, which makes unifying mesh.cpp extremely complex and unlikely to happen, which usually leads to losing changes.
Cycle move conflict
Cycle moves are not common, but they can happen if you move one directory inside another (src into code/src). In the meantime, somebody else performs the opposite operation (code into src/code).

When Plastic detects this case, it asks the user which move to keep because it can’t keep both.
Internally, it could create a infinite loop where one is a child of the other recursively (not a good thing).
Some version controls duplicate the trees, so you end up with /src/code and /code/src and all the files duplicated: It doesn’t look like a good conflict resolution strategy 😉.
Conflict resolution order – directories before files
When you solve a complex merge in Plastic, you’ll always have to solve directory conflicts (structure conflicts if you prefer) before file conflicts.
This is because you need to have a proper structure before "plugging" the files into it. So, suppose the directory structure needs you to solve whether you want to keep the rename from bar.c to foo.c or boo.c. In that case, you first have to solve that before merging the file’s content.
Both the command line and the GUIs follow this order to solve conflicts.
The following screenshot taken on Windows (macOS and Linux follow a similar pattern) shows a divergent move directory conflict followed by a file conflict on the same file; you first have to solve the directory conflict and then merge the file.
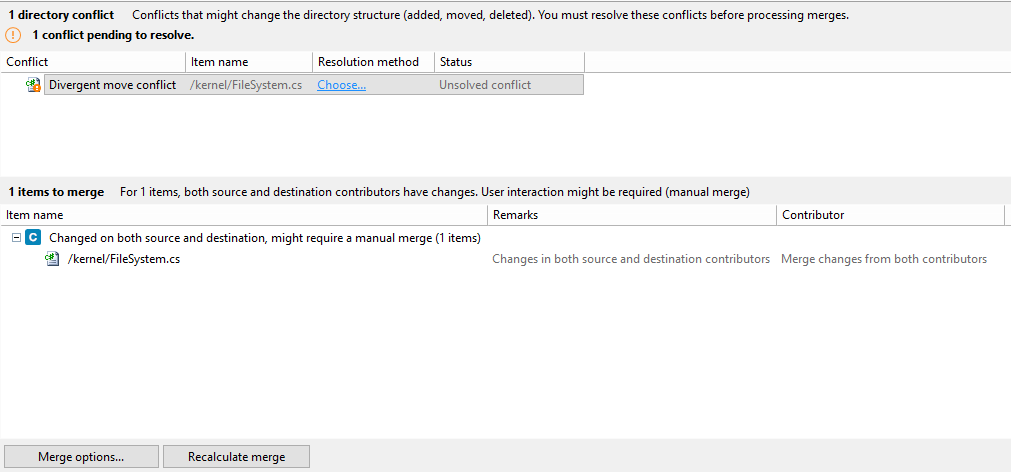
Automatic resolution of directory conflicts
For each type of directory conflict, choose whether the source or the destination contributor should be automatically selected to resolve the conflict. See the following example:
cm merge cs:2634 --merge --automaticresolution=eviltwin-src;changedelete-srcThe above merge operation from changeset 2634 resolves the eviltwin and changedelete conflicts by keeping the
source (-src) contributor in both cases.
-
A
-srcsuffix after a conflict type tells the merge command to keep the source contributor changes. -
A
-dstsuffix will save the destination contributor changes.
Here is the complete list of conflict types the merge command supports:
-
movedeviltwin -
eviltwin -
changedelete -
deletechange -
movedelete -
deletemove -
loadedtwice -
addmove -
moveadd -
divergentmove -
cyclemove -
all
The all value overrides the other options. In the following example, eviltwin-dst will be ignored:
cm merge br:/main/task062 --merge --automaticresolution=all-src;eviltwin-dstMerge from and merge to
The typical way merge in version control is as follows: You put your workspace pointing to the result, and then you merge from source. That’s why we call it "merge from".
It is the most common type of merging because it involves you, the developer, getting merged changes into your workspace, reviewing them and testing them before you checkin.
But, there is a different type of merging in Plastic that doesn’t require a workspace; it can be done entirely on the "repository side". It is useful under many different circumstances but especially with CI systems.
Years ago, it was very common for a developer to test their changes after doing a merge and before doing the checkin. Today, thanks to the ubiquity of CI and DevOps, it is more common to find a bot of some kind performing the merges.
In those cases, having a workspace can even be a burden because it means having extra working copies. By the way, the workspaces will be needed to build the code, but the merge step can be triggered by a different machine where having a working copy would be just an extra burden.
"Merge to" is also very useful as developers when you want to solve a merge conflict without having to switch to the destination branch, which can save quite a bit of time.
The figure shows the key differences between the "merge to" and "merge from" operations. We also call "merge to" a "workspace less" or "server-side" merge.

Removing changes – subtractive merge
What is a subtractive merge
Subtractive merge is a powerful merge operation that allows you to remove a given change while preserving the rest of the changes made later.
Consider the following scenario:

You need to get rid of the changes made in changeset 92, but the others are perfectly fine.
Deleting 92 is not an option since, as we saw in "Delete empty branches only" it is only possible to delete 92 if you delete 93, 94, and 95.
Subtractive merge comes to the rescue here as follows:

By "subtracting" 92, you create a new changeset 96 that only removes the changes in 92, and keeps the ones done later.
When should you use subtractive merge?
A simple rule of thumb: Don’t abuse subtractive merge. If you find many red lines in your repo (that’s how we render subtractive), be very careful. Subtractive is a tool to handle exceptions, not something to use daily.
This is because subtractive merge links are informative: They help you understand what happened, but they are not actively considered for merge tracking. And, you already know why merge tracking is so important to avoid issues. So, use it wisely.
How to undo a merge
Consider the following scenario: A couple of new branches were merged to create a new version, but then after some more intensive testing or during internal deployment, you detect the release is broken and figure out that branch bug088 is the one that introduced the bug:

How can you proceed here?
My recommendation, under normal circumstances, would be to implement a new task to fix the issue and solve the broken build:

I like this solution because it doesn’t introduce an exception case. It simply sticks to the same "task branch" and regular DevOps cycle. There is no manual intervention needed, just a new task branch that will be tested and merged by the CI system or a Plastic mergebot, and everything will proceed as usual even if we are fixing an unusual emergency provoked by a broken build.
Well, this is the "Subtractive merge" section so you most likely expect me to use a subtractive merge to solve the scenario, right?
Here we go:

The other alternative is to take advantage of subtractive merge to remove the changes made on bug088 (we are subtracting the changeset result of its merge, so all its changes will be gone) while preserving the later bug089 which was perfectly fine.
Re-merging a branch that was subtracted
Subtractive is powerful, but it is not a beginner’s tool.
In the purest "task branches" philosophy, you would abandon bug088 and create a new task to fix the new issue. But, sometimes that’s not doable because it is better to fix whatever happened to bug088 and merge again.
And it is the "merge again" that is worth a section since it is far from straightforward.
Let’s continue with bug088 and fix the issue we introduced there by doing a new checkin on that branch. Then, it would be possible to merge it back, right?
Wrong.

Now, you have an excellent opportunity to practice all the newly gained expertise in merge tracking. What happens when you merge 160 into 157?
Well, first 143 will be the common ancestor, and only the changes made in 160 will be merged. It means you are not really introducing all the changes done in bug088, but only the new changes in 160.
This is because the subtractive merge link is informative and not part of the merge tracking calculation. So it is completely ignored.
What is the right way to do it?
Pay attention to the following figure:

To "reintegrate" a previously subtracted branch with newer changes, you have to:
-
Cherry pick the subtracted changeset to reintroduce the changes. Important: Ignore traceability in the cherry pick, or the merge won’t happen. This is because you are cherry picking from
150to a child changeset of150. So, usually, the merge wouldn’t have to happen. -
Then merge the branch again.
The procedure is not hard, but you must know how to use this feature properly. I hope the explanation helped you master subtractive.
Cherry picking
Cherry picking is a way to merge just the changes made on a changeset or set of changesets instead of using the regular merge tracking to decide what needs to be merged.
There are several variations of cherry picking that we’ll be seeing in a minute.
Cherry picking doesn’t alter merge tracking, so be very careful and don’t overuse it because it’s a tool to handle exceptions, not to be used frequently.
Cherry pick a changeset
When you cherry pick a changeset, it means you want to apply the changes made in this changeset to a different branch. It is like applying a patch just taking the changes made in the changeset.
The following figure explains the case: By cherry picking changeset 15 to branch maintenance-3.0, you are just applying the changes made in 15 to the branch.

What would happen if you merged from changeset 15 instead? This is very important to differentiate because users often get confused about the difference between cherry pick and merge. Look at the following figure:

A merge from changeset 15 would apply the changes made in 11, 13, and 15, not just the ones in 15 as cherry pick does. That’s the key difference between cherry pick and merge.
Branch cherry pick
We can also apply a cherry pick of a whole branch instead of just a changeset.
Consider a scenario like the following: we want to cherry pick main/task12 to main instead of merging it.

The cherry pick will take the changes made on changesets 6, 8, and 9 into main, while the merge would also bring the changes made in 3 and 5 in the parent branch main/task10.
To put it in more formal terms (which I bet some of you will appreciate), the merge in the figure considers the (5, 9] interval; changesets 6, 8, and 9 will be "cherry picked".
Branch cherry picking can be very useful under certain circumstances when you want to pick a few changes instead of the whole history.

Conflicts during checkin – working on a single branch
There are cases where teams choose to work on a single branch because of different reasons. It can be a pair of developers collaborating on a single branch at the early stages of a new project or feature, or maybe the entire team working together on main because they have unmergeable files that they need to lock.
Let me show you how a possible scenario might evolve:

It all starts with Ruben and Dani working on the main branch. Each of them works on their workspace, so they have independent local working copies. And they are both synced to changeset 11. The houses represent where their workspaces are.
Then both Ruben and Dani start making changes. As you can see, they modified two different files.

Ruben is the first to checkin. He created changeset 12 when he checked in the change to Main.cs.
Now, Dani is ready to checkin Class1.cs too, but the repo is different from Ruben’s. There is a new changeset 12 that is in potential conflict.

The Plastic merge algorithm finds a potential conflict from the "topological" point of view since the changeset 12 is now in main and can collide with the local changes made by Dani.
In this case, the merge algorithm is smart enough to discover that the changes don’t collide; they changed different files.
Then, the checkin performs what we call an "update-merge"; the Dani’s workspace is updated to the latest during checkin, so his home would virtually go to 12, but then his changes (that do not collide with the ones coming from main at 12) are kept as if they were done on 12 (it is not a Git rebase, but some of the ideas behind are similar as you can see in "Plastic rebase vs. Git rebase").

The "update-merge" leaves a linear history without merge links, something we found is best in this scenario since users working on a single branch normally get confused by merge lines.
What would happen if they had both modified Main.cs instead? The following figure illustrates the case:

Now, Main.cs requires a real merge, so the regular merge algorithm takes control. As you can see, we have a base and then destination (12) and source (our local change) contributors, like in any regular merge.
Once Dani checkins the result of the merge, the Branch Explorer will be as follows:

And this can be confusing to some users who don’t understand why a merge link happens inside a single branch. But, the reason is clear. A merge from 11 and some changes happened to create 13.
Finally, I’d like to explain what happens when the merge during checkin involves more files than those in conflict because this is a subject that causes confusion quite often. Check out the following scenario: my local change is just Main.cs, which was also changed by someone else in changeset 12. But, in changeset 12, three other files where changed. They are not in conflict, but they need to be downloaded to my workspace as part of the merge.

The sequence of steps is as follows:
-
You want to checkin, and then Plastic warns you there are colliding changes.
-
Then you go and merge
Main.cs. -
You finish the merge and then check the status of your workspace.
-
And then you see
zoo.svg,bar.candfoo.cas "checkouts" in your workspace.
"Why are they marked as "checkedout" if I never touched these files" – some users ask.
Well, you didn’t change them, but they were involved in the merge. That’s why they are marked as checkouts. For more info about the status of the files during a merge, see "Plastic merge terminology".
Locking: avoiding merges for unmergeable files
Merging binary files
What happens if two team members modify an unmergeable file concurrently? Suppose you have a .jpg file and two artists made a change to it concurrently.

Plastic comes with a binary merge tool that is invoked only if a file is detected as binary (Plastic bases its decision on the file extension for known types, the filetypes.conf config file, and an algorithm that reads the first bytes of the file and figures out if it is binary or text. There is also a way to configure a mergetool based on the file extension). So, in this case, since ironman.jpg is detected as a binary, it will invoke the binary merge tool, which will only let the user choose which contributor to keep and which one to discard.
Since it is a jpg file, the binary merge tool can show a preview to help you with the decision as follows:
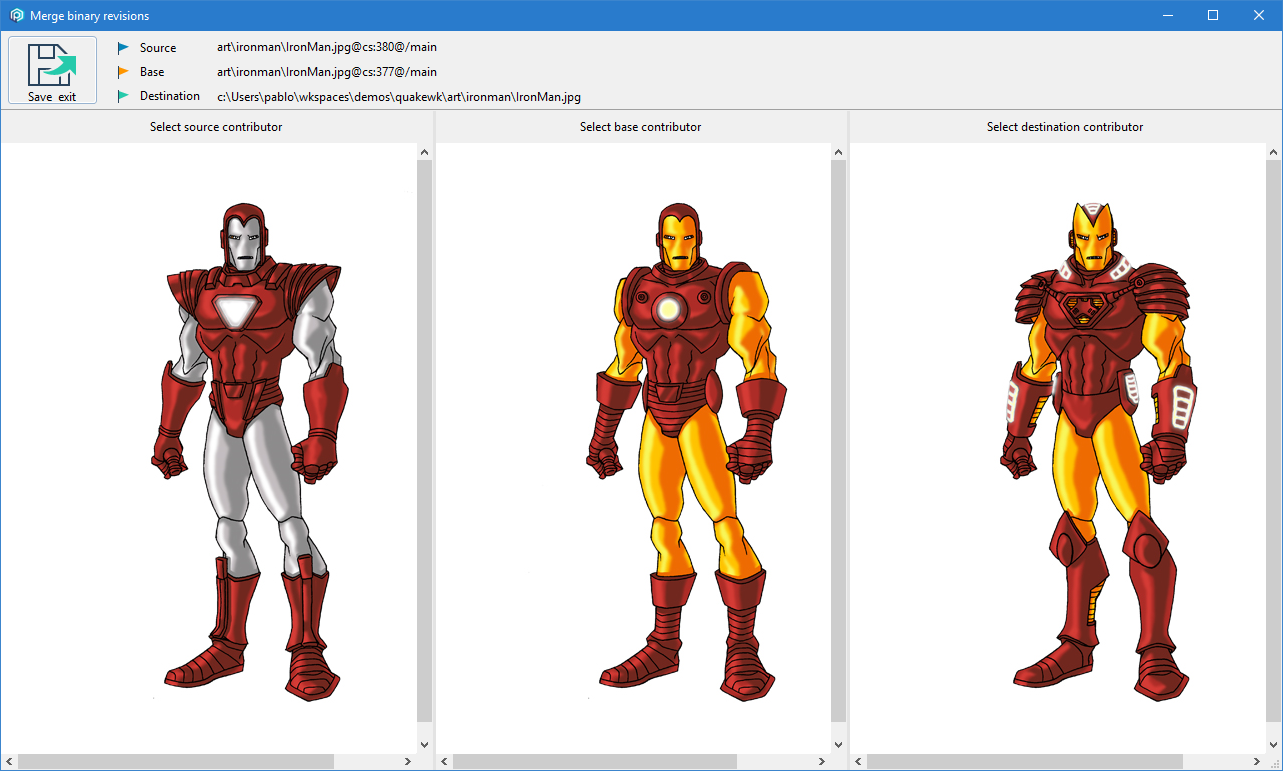
While it shows you the common ancestor and the two contributors, it cannot actually merge the pictures to produce a new one, and one of the changes will be discarded.
If the file in conflict was not an image, the binary merge tool won’t be able to create a preview (unless you plug a preview generator, but that’s a different story). What you would see in this case would be something as follows:
Anyway, what is clear from this example is that while there is a way-out during merge, it is not a good idea to discard work trying to work in parallel in files that can’t be merged.
Lock to prevent concurrent changes
Plastic can be configured to lock certain files and prevent concurrent changes (check this for more info).
I will explain how it works and what the team needs to do to take advantage of this feature.
First, the sysadmin needs to configure locking on the server for certain file extensions. In my case, I’m going to consider that all .jpg files are locked on checkout.
Then, let’s consider the following starting point:

Violeta and Carlos are working on the same project. Violeta decides to checkout the file ironman.jpg. In the figure, the checkout is done using the command line, but of course, the same operation can be done from a GUI.
Checkout is an operation to tell Plastic "I’m going to modify this file". Usually, it is not needed because you can modify the file without telling Plastic about it, and it will find out later.
But, checkout works differently for files configured to be locked. When you checkout ironman.jpg, since it is configured to be locked, a new entry is created in the server lock list, meaning that ironman.jpg can’t be modified concurrently.
|
To take advantage of locks, team members need to checkout the files. If they forget about it, then locks won’t be obtained or requested. There won’t be any way to prevent unmergeable files from being modified concurrently. |
In our example, Violeta correctly checkedout ironman.jpg, and the file was added to the server lock list. I just added the file’s name to the list in the figure above, but in reality, info about the itemid is also added to identify the locked files properly.
Suppose that now Carlos tries to checkout ironman.jpg too:

The checkout operation fails because Violeta already locks the file in a different workspace. This is how we can prevent unmergeable files from being wrongly modified concurrently.
Later, Violeta finishes her work and checkins the changes. A new changeset 13 is created on main, and the entry in the lock list is now cleared.

Now, Carlos is free to lock ironman.jpg to perform changes, correct? Not quite yet:

Carlos is still on changeset 12 in his workspace, so he can’t lock the file because, while there aren’t locks for ironman.jpg held at this point, his revision is not the latest.
Plastic ensures you can only lock the latest version of a file otherwise concurrent modification wouldn’t be prevented.
Then, Carlos decides to update his workspace to changeset 13, and he is finally able to lock the file.

This way the changes in the jpg file will be serialized since nobody will be able to make concurrent modifications.
Locks only work in single branch
The Plastic locking system only works well if you work on a single branch. This is because we didn’t implement the ability to coordinate locks among branches. You can easily force the situation where you held a lock on a branch, so nobody else can modify the file, then checkin. Of course, at this point, someone else could lock the file on a different branch. But this won’t prevent concurrent modification.

In the figure, someone created changeset 13 after locking ironman.jpg on main.
Later someone creates a branch starting from changeset 11 and locks the file (checkout). Their version of ironman.jpg is the latest on their branch, so they can perform the lock, but obviously we are not preventing merges since this is in fact a concurrent modification.
So, keep in mind that locking is very useful to deal with unmergeable files, but you need to restrict its use to single branch operation.
Plastic rebase vs. Git rebase
We often use the word rebase to refer to a merge from main (or a release branch) to a branch of a lower hierarchy.
A typical rebase in Plastic is something as follows:

You can see how the branch task103 started from BL131 (it was "its base"), and then later we wanted to update the branch with the latest changes in BL132 (changed the base, so we call it "rebase").
But, if you have a Git background, or simply want to become a master in version control 😉, then it is worth pointing that the term rebase has a completely different meaning in Plastic.
Of course, it is possible to do something as follows in Git:

Which would be the exact equivalent to the operation made above in Plastic.
But let’s rewind a little bit to explain the scenario in Git better.
You start working on a branch and perform a few commits on it. And meanwhile, the master branch that you branched from also evolved.

Then, at a certain point, a new commit is tagged in master, and you want to bring those changes to task103. One option would be to merge down as we did above.

But, in Git you can do a "rebase", which is a history rewriting operation. A rebase creates new commits C' and E', which resemble the changes made in the original C and E but starting from F. Actual file merges can happen during the rebase.
The old original commits C and E are left in the repo, but they are now inaccessible and will be removed in the next repo garbage collection operation.

|
It is discouraged to do a rebase if you’ve already pushed your branch |
So far (I’d never say never), we haven’t implement history rewriting ourselves since we prefer to think of repos as what happened instead of a rearranged history. Git made rebases super popular, so whether we implement something similar will only depend on user demand.
One thing to keep in mind is that one of the main reasons to do rebases in Git is to simplify understanding the changes, because linear history is easier to diff than when changes come from merges. Keep in mind that:
-
Diffing a branch in Plastic is straightforward because Plastic knows where the branch starts and ends. Knowing where the branch starts and ends is commonly impossible to determine in Git due to fast-forward merges and the extended practice of deleting branches.
-
Git doesn’t provide built-in diff tools. Many third-party tools do a side-by-side diff, but the default package comes with unified diffs suitable for the command line. Plastic, in contrast, excels in diff tools (it even comes with built-in SemanticDiff) which makes explaining differences easier. My point here is that rebase is often needed in Git to workaround with history rewriting what a proper diff tool can do. In Plastic, a diff will tell you which files and lines come from a merge and which don’t. Check the following screenshot to see a diff of a branch involving a merge:
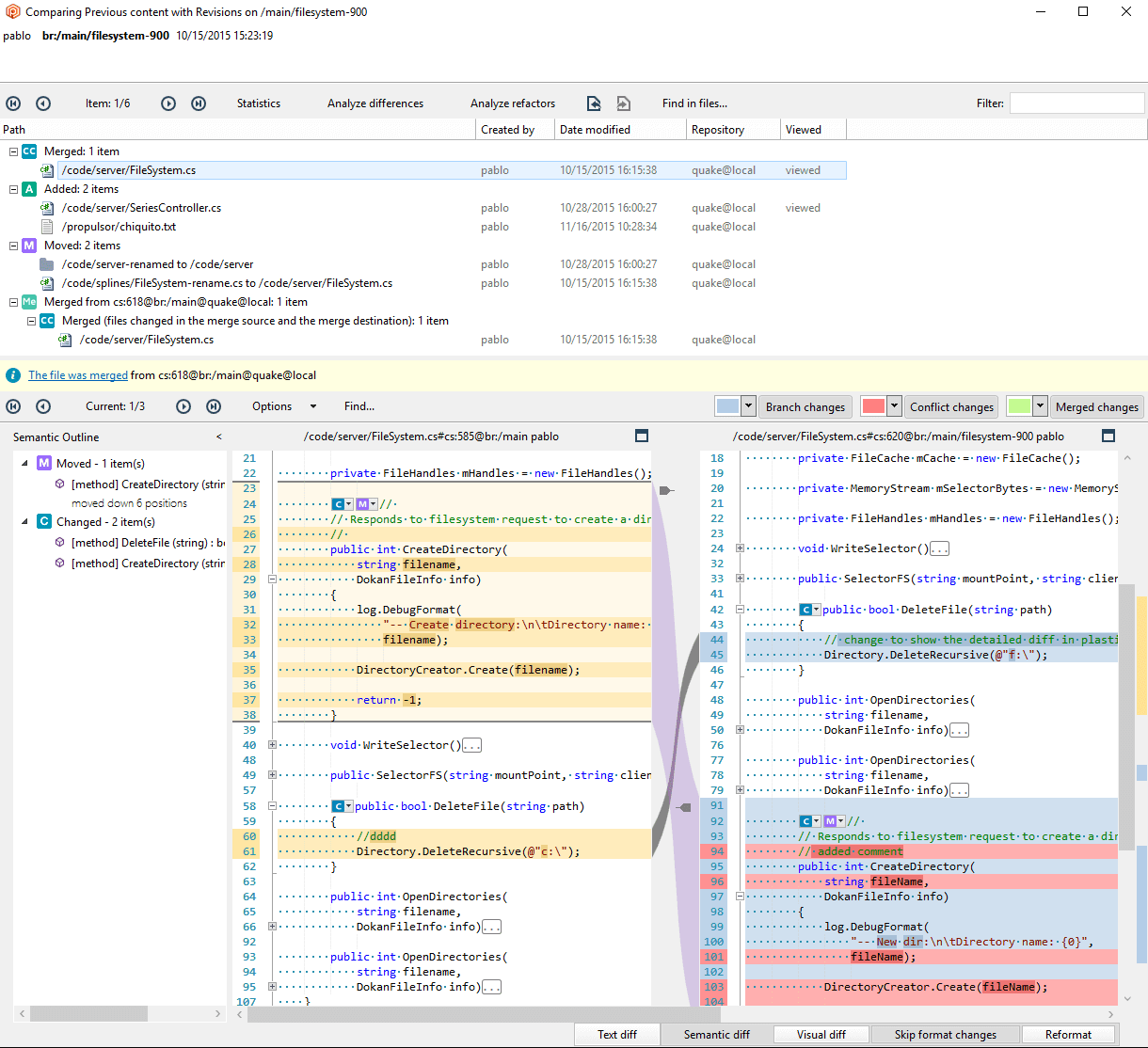
Learn more about Git vs. Plastic diffing abilities.
Workspaces
The workspace is a central part of the interaction with the version control. It is the directory that you use to interact with the version control, where you download the files and make the required changes for each checkin.
In this chapter, we will explore the two different types of workspaces in Plastic: Full workspaces and partial workspaces. We’re going to delve into how workspaces are configured, how they work, and how they shape how Plastic works.
Full workspaces vs. partial workspaces
Plastic SCM supports two different types of workspaces:
- Full workspaces
-
Also known as "standard workspaces," "traditional workspaces," "Plastic workspaces," and "classic workspaces". "Full workspace" is the way to standardize how to refer to them. Full workspaces are in sync with a changeset at any given point in time. It means the contents you have on disk resemble a changeset on the server plus any local changes you have made. Full workspaces are suitable for running merges and are normally chosen by developers.
- Partial workspaces
-
Also known as "Gluon workspaces". We introduced them together with Gluon, the UI and workflow for non-coders, typically artists in game development. They were built around three key requirements: Don’t download the entire tree of a changeset, merge is never required, and work in a per-file basis (being able to checkin even if part of the workspace is out of date with head).
If you didn’t understand part of the previous definitions, don’t worry; the goal of this chapter is to ensure you master both types. Keep reading 🙂.
What is a workspace
Imagine you have a repository that looks like the following:

And then, you create a workspace to work on it. A new workspace is initially empty until you run an update, which is responsible for downloading the files and directories from the repo to your disk.
In our example, imagine we run the following combination of commands:
cm workspace create wk00 c:\users\pablo\wkspaces\wk00 --repository=quake@skull:8084
cd c:\users\pablo\wkspaces\wk00
cm switch main/task2001|
I’m using Windows paths, but it will work the same using Linux/macOS paths. And I’m using the command line, but you can achieve the same behavior from the GUI. |
The first command, cm workspace create, creates a new workspace and sets quake@skull:8084 as the repo to work with. By default, the main branch is where new workspaces point to.
The second command, cm switch, switches the workspace to a given branch, main/task2001 in our case, and runs an update.
If you check your Branch Explorer at this point, it will look like this:

The home icon in the Branch Explorer highlights where the workspace points to. In our case, it points to the latest on task2001, or the changeset number 6.
What happens when you run the switch?
Remember the chapter "Merging trees" where we went in great detail through how every single changeset points to a given tree. Let’s consider now that the tree in changeset 6 is something as follows:

The result of the switch (which is actually like an update) will be the following directory structure on your workspace: (in my case, it was c:\users\pablo\wkspaces\wk00)
/
/inc/
/inc/foo.h
/inc/bar.h
/src/
/src/bar.c
/src/foo.cWhere the files will have exactly the contents of the corresponding revisions on the repository.
A complete workspace is just a copy on your disk of the actual structure of a given changeset. This definition will vary a little bit in a partial workspace since the copy won’t have to match just a single changeset.
Metadata of a workspace
Let’s rewind a little bit, and let’s see what happens when you download data to an empty workspace.
With the actual files being downloaded for the repo, Plastic creates (or updates) three key files inside the .plastic hidden directory in the root of the workspace: plastic.wktree, plastic.selector, and plastic.workspace.

-
plastic.selector contains information about the repository and the current branch. The name "selector" is kept for historical reasons. In pre-4.0 versions, it contained rules to select which revisions to load, but this is all gone now.
-
plastic.workspace contains the workspace name and a GUID to identify it.
-
plastic.wktree is where the essential metadata is stored. It contains metadata about the revisions downloaded from the repo that will later be used to track changes in the workspace. The metadata contains the name of the file or directory, the revision number, a timestamp of when it was written to disk, a hash of its content downloaded from the repo, and then extra info to display in GUIs and command line like the author.
|
File timestamp on plastic.wktree: Stores the date when the file was written to the workspace, not when it was created in the repo. This way workspaces are build-system friendly. When you get a different version of a file, its date on disk will be newer, even if the revision is older, making build systems trigger a build because there are changes (think Ant, Makefile, etc). |
Update and switch operations
In the first example, I ran a switch, the command used to point the workspace to a different changeset or branch. The update operation is equivalent to a switch that says "switch to whatever is latest in my current configuration."
Update
Let’s continue with the same sample repo, but suppose my workspace was located on changeset 3 instead, and we decide to run an update.

The structure of the trees of the changesets 3 and 5 are as follows:

So, when you decide to run an update, Plastic will realize it is in changeset 3, and it has to jump to changeset 5. It knows it has to download a new version for bar.c replacing the current one. At the same time, it downloads new data to update /src/bar.c, it will update plastic.wktree accordingly.

Update moves the workspace to its latest configuration. So, suppose if your workspace is set to work on main, and you run an update, Plastic will locate whatever the branch’s head is and try to jump to it, updating both data and metadata in the workspace.
Switch
Instead of going to "latest", a switch is an update that jumps to a different configuration, typically a different branch or changeset.
Let’s start from where we left in the previous section:

And let’s run a switch to main/task2001:
cm switch main/task2001Plastic will check the trees of the changesets 5 and 6:

And then figure out what needs to be downloaded to convert your working copy into changeset 6.

In this case, a new file inc/foo.h will be downloaded from the repo (it didn’t exist on the workspace before), and the contents of both src/bar.c and src/foo.c will be updated to different revisions.
Update to a different repo
It is possible to update a workspace to a different repository. In Plastic, workspaces are not tied to a given repo: You can reuse a workspace to work with a different repository at any time.
The update and switch operations will try to reuse as much data as possible to reduce the traffic with the repo (which might be a distant server). I mean, even if the revids don’t match, Plastic will try to reuse files based on hashes. So, if you switch your workspace from main/task2001@quake@skull:8084 to main/task2001@quakereplica@localhost:8084 where quake and quakereplica are replicas of the same repo, Plastic will try to reuse all the files on disk, and if changeset 6 exists on both, no new file data will be downloaded.
The only practical reason why you wouldn’t switch a workspace, though, is size. I mean, suppose your workspace is 3GB, and you have local files that add another 2.5GB. If this workspace points to quake@skull:8084, and you plan to continue working on this repo, there is no good reason to switch to doom@skull:8084 and have to download another 5GB and discard the 2.5GB of local private files.
One repo many workspaces
Although it is already clear that workspaces in Plastic can be used to switch to different repos, it is important to highlight that more than one workspace can simultaneously work connected to the same repo.
You can have many workspaces pointing to the same local repo:

And there can be different workspaces on different machines directly working with a repo on a remote server:

This might sound obvious to most of you, but if you are coming from Git, you’ll be used to a one-to-one relationship between working copy and repo since this is the Git architecture. There is no possible way to connect working copies directly to a remote repository since a local intermediate repo is always required.
Tuning the update operation in full workspaces
When you run an update or switch operation, a few configuration files affect how the files are actually written to disk.
These files can be private to the workspace, part of the repository (checkedin to the root dir of the repo), or can be global files. You can learn more about the specifics of how to set up these files in the Administrator’s Guide, Configuration Files section.
This section won’t get into the details about the actual formats, but it will explain what they do in-depth.

Cloaked
cloaked.conf defines the paths to cloak in the workspace. The file is defined as a set of user-defined regular expressions. The files that match any of the rules will be cloaked.
Cloaked works in two different ways:
-
Suppose you already have
/src/foo.cin your workspace, and then you decide to cloak it. This means the file will be ignored by the update and hence never be updated even if new versions exist. It is useful if you want to avoid downloading certain big files or a huge tree because you can continue working with what you have and save time in updates. -
Suppose your workspace is empty and a
cloaked.confthat matches/src/foo.cexists in the repo, or you create one on your workspace. This means/src/foo.cwon’t be downloaded. It is useful to prune certain parts of the tree, generally due to size issues.
|
The merge operation might ignore the cloaked files when the file needs to be downloaded to resolve a merge. |
You can read the details of how to setup cloaked.conf and check the reference guide to learn how to configure it from the GUI.
Readonly and writable
By default, Plastic sets all files on the workspace as writable. It is the default behavior since most developers just want to edit a file and save it without dealing with overriding the read-only attribute.
But, sometimes, it is useful to set files as read-only so that users see an operating system warning asking them to override the read-only setting when they hit save in their applications. This is commonly used by team members working on assets that need to be locked, as a reminder to checkout the files before saving them.
Plastic provides a global setting to decide whether an update should set files as writable (the default) or read-only.
The writable.conf and readonly.conf config files are useful to create exceptions to the global setting.
In a default "everything is writable" configuration, readonly.conf will define which extensions or file patterns must be set as read-only on the workspace.
And writable.conf does exactly the opposite.
You can read the details of how to setup writable.conf and readonly.conf and check the reference guide to learn how to configure this setting from the GUI.
Tune EOLs
Admittedly, this is one of my least favorite settings. We only added it to ease the transition of teams to Plastic from their previous version control.
The file eolconversion.conf defines which files need to convert end of lines during the update and reverted back to their original during checkin.
I’m not a fan of this option because otherwise, Plastic never touches the file content during update or checkin, preserving what the developer created. Converting EOLs introduces a performance impact and breaking the "we preserve what you wrote" rule.
Nevertheless, some teams prefer to see Windows-style EOLs on Windows and Linux-style EOLs on Linux and macOS. Nowadays, almost all editors I’m aware of are capable of handling EOLs transparently. Still, some teams and some tools prefer that the version control normalizes the end of lines.
Learn how to specify eolconversion.conf.
Finding changes
Let’s go back to where we left our sample workspace in the previous example, having just switched to main/task2001:

The plastic.wktree contains the metadata of the files "controlled" by the workspace, the ones that resemble what is in the repo.
Looking for changes
Each time you run a cm status on the command line or go to "pending changes" or "checkin changes" in the GUIs (we use the two names interchangeably), Plastic walks the workspace to find any changes.
It groups the changes in the following sections:
-
Files and directories to add.
-
Changed files.
-
Deleted files and directories.
-
Moved/renamed files and directories.
Check the following figure, based on the scenario above where the workspace points to changeset 6:
-
It finds that
inc/bar.hexists in the metadata but is no longer on disk, so it is considered "locally deleted". -
The timestamp of
src/foo.con disk is newer than the one stored in the metadata, so the file is changed. There is an option in the Plastic settings to double-check: If the timestamp changes, calculate the hash of the file on disk and compare it with the one stored in the metadata to mark the file as changed. Checking the timestamp is much faster, but some tools tend to rewrite files even if they didn’t change, so enforcing the hash check is sometimes very useful. -
src/new.cexists on disk but didn’t exist on the workspace tree, so it is marked as a private file that is a candidate to be added to the repo in the next checkin. More about private files in "Private files and ignore.conf".

I didn’t cover how moves and renames are detected since they have their own section.
Now, you have a pretty good understanding of how changes are detected in a workspace.
Private files and ignore.conf
Any file or directory you add to the workspace will be considered private. Private means it is just local to the workspace and won’t be checked in, and changes won’t be tracked.
Each time you ask Plastic to find changes, the local files will show up marked as private.
All these privates are suggested by the GUIs to be added to source control.
Very often, that’s exactly what you want to achieve because you just added a new file and want to add it to version control.
But there are many files, like local configs or intermediate build files (obj, bin, etc) that you want to ignore, so Plastic doesn’t show them repeatedly.
All you have to do is to add them to ignore.conf and Plastic will, well, ignore them 🙂.
Although adding files to the ignore.conf list is very easy from GUIs or simply editing the file. You can read the details of how to setup ignore.conf.
Detecting moves and renames
In the chapter about merges, you already saw how good Plastic deals with moved files and directories and how important it is to help refactoring the codebase.
But, before a move is checked in to the repo, first, it has to be detected on the workspace. This is what I’m going to explain now.
Let’s start again with changeset 6 in the examples above and consider the following local changes:

The file inc/bar.h is no longer on disk, and a new one inc/ren.h appeared as new.
If move detection is enabled (by default, but it can be disabled), Plastic tries to match added/deleted pairs to try to find moves.
The following figure gives an overview of the algorithm:

-
If
bar.handren.hhave the same size, then Plastic checks their hashes. If they match (bar.htaken from metadata andren.hcalculated from disk), then it means it found a rename (or a move, which is the same as a rename but happens between different directories). -
If files are considered text files, then our similarity algorithm will try to find how similar the files are. Since the hashes and sizes don’t match, it means the file was modified after being renamed. So, if the similarity % is higher than a given configurable threshold, the pair will be considered a rename/move.
-
Finally, the similarity algorithm won’t work if the files are binaries, so Plastic compares their sizes. If the sizes are very similar, then binaries are marked as moved. This is a best guess because it is not that simple to figure out that a PNG was renamed if it was later modified, but we try to refine the heuristic to avoid false positives.
The move/rename detection also works for directories. Let’s see it with an example: Suppose we rename the inc/ directory to incl/. Then, the change detection algorithm will see is something as follows:

It finds that inc/ and its children are no longer on disk, and a new tree incl/ has been added.
Then, the added/deleted pairs will try to be matched. In this case, the algorithm finds that inc/foo.h and incl/foo.h have the same size and content, so they must be the same file. And the same happens for ren.h.
But instead of showing a pair of moves, the Plastic algorithm goes one step further: It tries to match inc/ and incl/. Since its contents are the same, it detects a rename of inc to incl and cleans up the individual file moves.
Suppose the files were modified, deleted, or moved after the directory rename. In that case, Plastic will apply a similarity percentage to the inc/ directory structure. Suppose the structures are similar up to a given %. In that case, the directory will be considered as a move/rename instead of added/deleted.
We are very proud of move detection, and we gave this feature a big name: "Transparent scm" or "transparent version control" because you can simply work in your workspace, make any changes, and trust that Plastic will detect what you have done.
We use several extra techniques to detect moves, but I’ll cover that in its own section.
Hiding changes with hidden_changes.conf
Just like you sometimes need to ignore private files with ignore.conf, there are scenarios where you don’t want Plastic to detect changes in specific files because you don’t want to accidentally include them in the next checkin. This can happen if you need to adjust config files for a debug session or alter some source code for whatever reason, but you don’t want to checkin those temporary changes.
hidden_changes.conf helps achieve that. You can read the details of how to setup hidden_changes.conf and check the reference guide to learn how to configure it from the GUI.
Controlled changes - checkouts
So far, we’ve been doing changes in the workspace and letting Plastic detect the changes.
But there is another alternative: Telling Plastic exactly what you changed, moved, or deleted, so it doesn’t have to "guess".
We call these "controlled changes" and "checkouts" are a subset of them. Still, normally we use "checkouts" for all changes in the workspace that are "controlled" by Plastic because you notified about them.
Notifying added, deleted and moved
Suppose you want to heavily refactor your project. You can expect Plastic to correctly guess what you did after the fact based on similarity algorithms. What is the alternative?
Let’s start again from the tree in changeset 6:

And let’s perform the following actions:
cm mv inc incl
cm mv incl/foo.h incl/ren.h
cm rm src/foo.c
echo foo > readme.txt
cm add readme.txtNow, let’s check the metadata of the workspace:

As you can see in the figure:
-
plastic.wktreenow contains information about the actual changes. It knowsreadme.txtwas added, that/inclwas renamed, and also/incl/ren.hwas renamed. It also knows thatsrc/foo.cwas deleted. -
plastic.changesis a new file that is now present in the.plasticmetadata directory. It complementsplastic.wktreewith information about the actual changes. Whileplastic.wktreeknows that/inclwas renamed,plastic.changescontains the data of the actual rename, the source of the move, etc.plastic.changesdoesn’t store the info as a list of operations but more like a tree (also displayed in the figure). This tree is a subtree of the workspace metadata that is ready to be sent to the server and contains extra info for the nodes that were moved to identify the sources of the moves/renames. It is a subtree decorated with extra info telling the operation that was applied to create it.
Note that I marked the tree with a "CO" instead of a number. CO stands for checkout. plastic.changes contains what we call "the checkout tree", which is a tree that contains the local changes controlled by Plastic and ready to be checked in.
There is something important to note: When you tell Plastic to move, add, or delete, Plastic doesn’t have to guess these operations anymore. Unlike what was described in the "Finding changes" section, these are controlled changes; Plastic knows about them because you told it you did them, so there is no guessing or heuristics involved.
One of this alternative’s key advantages is to handle moves and renames; there is no guessing involved, so you can perform extremely complex refactors with "moves" and Plastic will track exactly what you did.
After performing these changes, if you go to the Branch Explorer, you’ll see something as follows:

See how there is a new "checkout changeset", and the home icon is on it, meaning your workspace is not synced anymore to changeset 6, but 6 and some controlled changes on your workspace.
If you make "not-controlled" changes (make the moves and deletes and let Plastic detect them automatically), then there won’t be a checkout changeset in your Branch Explorer.
Notifying changes
You can tell Plastic you are going to modify a file by using the checkout action both from GUIs (right-click a file from "Workspace Explorer" and select "checkout") and command line (cm co command).
Let’s continue with the example above. You can perform:
cm co src/bar.cAnd Plastic will mark the file as checkedout both in plastic.wktree and plastic.changes.
This is what we strictly call a checkout, although, as we saw in the previous section, we extend the name checkout for controlled deletes, moved, and added files.
When to use controlled changes
Very simply, to control changes:
-
If you need to lock files, you must checkout first. Check "Locking: avoiding merges for unmergeable files" for more info. Never forget to checkout before making any changes to files you need to lock, or there will be a risk of losing your local changes if someone else locked the files and modified them first.
-
If you want to perform a very complex refactor, chances are you are better served by
cm mv(or GUI equivalent) than letting the heuristics guess what you did after the fact. -
If you have a huge workspace (bigger than 700k files) and the performance of detecting changes is not fast enough (it takes more than 4-5 seconds, which starts to be annoying), you probably are better served by checkouts. To achieve this, you have to disable finding local changes and stick to checkouts. There is an option in "Pending Changes" (or "Checkin Changes") in all GUIs to do this: By disabling it you make Plastic show the checkouts, and ignore any changes done locally. Hence, it relies on you telling it what you did.

-
You’ll be using controlled changes transparently if you enable your plugin for Visual Studio, Eclipse, IntelliJ, or Unity plugins (among others) because the IDEs notify the underlying Plastic plugin about changes to files, renames, moves, and the plugin simply performs the controlled operation underneath.
Usually, you will use a combination of controlled and not controlled changes; most likely you’ll simply modify files, but sometimes you’ll delete or move files from the Plastic GUI. Plastic is able to deal with both types of changes simultaneously.
Advanced change tracking
We are obsessed with the idea of doing precise change tracking in a transparent form. I mean, even if you don’t notify Plastic of anything, our goal is to create algorithms good enough to detect what you did after the fact. We love the idea of transparent version control so you can simply focus on getting your refactors and changes done with minimal interference from Plastic.
That’s why we developed a set of techniques that I think is worth sharing.
Fast change detection with watchers
Walking the full workspace tree to look for changes means reading the entries of each of the directories and comparing size, name, and last write times with the workspace metadata (plastic.wktree).
Doing this walk in a naïve way proved not to be fast enough, so:
-
In Windows, we take advantage of the
FindFirstFile/FindNextFileAPIs to minimize the number of reads. -
In Linux/macOS, we use the same technique the find command uses to traverse the disk fast: The FTS functions.
-
We take full advantage of Windows
ReadDirectoryChangesWAPIs (a.k.a. File System Watchers) to detect changes in the workspace and reduce directory traversals. This allows the GUI to find changes much faster after the first time because it focuses only on what changed after the first run. -
In Linux, we use
inotifyto speed up change detection. The problem is that inotify is much trickier to configure than its Windows counterpart. Usually the user needs to do some tuning to use it. Learn how to enable INotify in Linux. -
As I write this, we plan to take advantage of
FSEventson macOS. However, they are not so flexible as Windows watchers and impose more limitations.
Advanced move detection
In Windows, we can use the USN Journal on NTFS volumes to do precise move tracking. Linux and macOS don’t provide an equivalent feature, which is one reason we were reluctant to enable it in Windows. This means there is a way to precisely detect moves and renames, detected by the file system itself. The only downside is that many editors don’t really rename but create a new file with the new name and then delete the old one.
Switch branch with changes – why it is risky
By default, you can’t switch to a different branch (or changeset, or label, I mean, change configuration) if you have pending changes (controlled or not controlled). There is a configuration setting in preferences to allow this switch but, it should only be used if you understand what the behavior will be. And this is what I will explain in this section.
Let’s go back to our example repo and suppose we are now on changeset 6, and modified src/foo.c:

And now, we’d like to switch from changeset 6 to 5 (switch from task2001 to main). Initially, Plastic will tell you that you can’t because you have pending changes. If you force the setting, Plastic will let you do the switch, and your workspace tree will be as follows:

Note, that the revid of src/foo.c says that your changes come from revid 03, the one loaded in changeset 6, and not revid 10, which should have after you switched to changeset 5.
Now, you will be unable to checkin src/foo.c, because Plastic will complain that the metadata of your file src/foo.c doesn’t match the one loaded by changeset 5.
The actual message is: "The parent revision of the item /src/foo.c is inconsistent with the loaded one in the changeset `cs:5`".
Why does Plastic behave this way?
Well, suppose Plastic lets you complete the checkin: You would be entering changes based on foo.c revid 03 and completely overriding changes done in revid 10. You would be losing changes! It would be like copy/pasting a file, overwriting your local changes, and doing checkin.
It might be a little bit confusing if you encounter this situation, but the reason is to avoid losing changes at all costs, and that’s why Plastic doesn’t allow you to work this way.
What is the point of allowing you to switch workspace configuration while having pending changes? Well, we heavily considered the option to simply disable such behavior (as Git does), but we are aware of cases where it can be useful:
-
You have a config file in version control, and you modify it to do some tests.
-
Then, you want to test this config on a different branch.
-
Well, it is very useful to just switch branches and test. But, the point here is that you’ll never checkin these changes, at least not outside the branch where they were originally made.
What if you really want to override changes?
Suppose you want to modify changeset 5 with changes coming from 6 without using merges. In that case, you can shelve src/foo.c and apply those changes to the new configuration and checkin.
You might think, this will "merge the changes", not override them. Yes, that’s true. Suppose you want to override src/foo in changeset 5 with your changes made while working on a different branch. In that case, you have to manually copy the file, switch, then overwrite. I know this is not ideal, but what you are doing is not a recommended practice. It should be a rare case that you shouldn’t perform often, and that’s why we think we shouldn’t make it easier 🙂.
Full workspaces are always ready to merge
Full workspaces are always in sync with a given changeset. They can have local changes based on that changeset but will always be in full sync with it.
What does this mean?
I’m adding again the branches and trees we are using all through this chapter:

What I mean by full sync is that if your workspace is in changeset 5, its metadata has to resemble what was loaded there. You must be loading the correct bar.c, foo.c and bar.h. A configuration like the following will be valid:

And, of course, bar.c, foo.c and bar.h could be heavily modified but always based on the right revisions loaded from changeset 5.
If you were in sync with changeset 3, your workspace tree would load the exact revisions on that tree, and your workspace changes would be done on top of those versions.
What I mean is that a configuration like the following is not valid in a full workspace:

And, it is not valid because you can’t be in sync with a changeset while loading revid 16 of bar.c and revid 03 of foo.c because such a configuration never existed in the repo. See what I mean? Being in full sync means that what you have on disk (before changes, of course) resembles exactly a changeset on the repo.
You may say, you can have cloaked.conf in place and then avoid the update of certain files. And yes, that would be correct, but those files would always be updated to resemble the workspace configuration during the merge if needed.
And I already mentioned merge, which is the key for this way of working together with what we saw in "Switch branch with changes": Full workspaces are always ready to checkin to the head of its loaded branch, and always ready to merge, that’s why:
-
They must be in full sync with a given changeset, which means their metadata matches the one in the changeset.
-
There can’t be files loaded from a different changeset. Otherwise they won’t be checkedin (as we saw in the previous section).
-
And it won’t be possible to perform merges if their workspace is not in full sync either.
And now we put together what we learned in the merge chapter with what we just learned about workspace metadata.
Suppose you want to merge from task2001 to your workspace based on main but with the configuration marked as wrong before: The one loading bar.c revid 16 and foo.c revid 03.
How can you calculate the common ancestor? You can’t.
Common ancestors are calculated based on per-changeset merge tracking. Since your current configuration doesn’t match any changeset, there is no way to find the "destination changeset". Hence, no way to calculate the common ancestor. If we assume your workspace is on changeset 5 despite these changes in bar.c and foo.c, the resulting merge would be wrong because it would incorrectly merge those files due to wrong common ancestors, potentially losing changes.
How can you lose changes? Well, you are loading foo.c revid 03, which was created on changeset 1, but merge tracking will assume you have revid 10, created on changeset 3. You will delete all changes made after changeset 3 on main if Plastic allows you to merge from any branch with changes in foo.c while having inconsistent configuration.
This is the reason why Plastic is always so strict about keeping full workspaces in sync. That’s why you need to update before checkin (even if it happens automatically as described in "Conflicts during checkin – working on a single branch") to always keep your workspace in sync to a given changeset and always stay ready to merge.
There is a way to break this synchronization and create more flexible configurations: Partial workspaces. We’ll see them in depth in the next sections.
Partial workspaces
We created partial workspaces for Gluon, the GUI for game development artists, and anyone not dealing with code and mergeable files. Gluon and partial workspaces (and the cm partial command) are great to deal with documentation (I’m using Gluon to checkin every single change to this book while I write), images, diagrams, design documents, excels, reports, and any initially unmergeable files you modify on a single branch.
Gluon and partial workspaces are typically used with file locking and checkouts to prevent concurrent changes on unmergeable files. It is possible to use Gluon with text files that can indeed be merged, but I’d say it is not the main scenario for Gluon and partial workspaces.
Configuring your partial workspace
After you create your partial workspace (typically using Gluon, although you can also create a regular workspace from CLI and then run cm partial configure), the next step is to configure it. Configuration tells Plastic what files you want to download and track, which means the workspace will behave differently from a full one.
I will start with the example we were following in the chapter, and show the trees on the repo and how everything is mapped to the workspace.

The figure shows how we started working on our partial workspace when the only changeset that existed on the repo was changeset 1. Then, we configure the partial workspace to download only src/foo.c, and the workspace metadata will reflect that; it just loads foo.c revid 03. Note how I deliberately omit revision numbers for directories.
Also, note how the src directory is "partially checked" during configuration. This means not all its children are loaded, and it will impact how the update operation works in partial workspaces. More on that later.
Partial workspaces aren’t in sync with a given changeset
Then, after a while, the repo evolves to changeset 2 (someone else did a checkin). Then we decide to configure bar.c as follows:

Note how the src directory is now fully checked because all its children are fully checked. Our local metadata now loads bar.c revid 07 and foo.c revid 03, so we could consider our workspace is synced to changeset 2 although that won’t last.
The repo continued evolving, and it is now at cset 5. And then, we decide to update just one of the files we have: we only update bar.c, but we don’t download the new changes of foo.c.

At this point, we couldn’t draw a "house icon" on any changeset on the Branch Explorer because the workspace is not "at any given changesest" anymore. So, what we have in the workspace is a mix of things on the repo, but they are not together in the same way they are in the workspace at any changeset.
Then, the repo continues evolving, and it reaches changeset 7. At this point, we run a full update, and the new src/new.c will be downloaded, together with the new version of foo.c that we refused to download before. The file new.c is only downloaded during the workspace update because the src directory is "fully checked". If it wasn’t fully checked, new files wouldn’t be downloaded during the update. At this point, we could say our workspace is again in sync with changeset 7 although this is not a common scenario with partial workspaces, which tend to stay "not synced to a given cset" for a long time.

Changeset 8 brings new changes for foo.c and new.c, but we only decide to update new.c. Our workspace isn’t in sync with a changeset anymore.

Partial workspaces can checkin without downloading new changes
Then, changeset 9 introduces even more modifications (made again by someone else working on the repo), but at this point, we don’t make any updates. But, we modified bar.c locally.

Now, with our workspace not in sync with any changeset, we’ll try to checkin bar.c. The partial workspace can do that without requiring a previous update to be "in sync with head".
The following figure shows what happens after you checkin src/bar.c from the partial workspace. A new changeset is created in the repo (changeset 9 this time), but the local metadata is only updated for bar.c, while the rest stays how it was.
We created a new changeset on the branch, while our workspace doesn’t have the same file versions than the new head changeset we just created. This flexibility is the key benefit of partial workspaces.

Of course, don’t try to perform branch merges on partial workspaces. It’s not possible to merge to the current workspace status because it doesn’t resemble any changeset configuration, and hence merge tracking wouldn’t work.
Other than that restriction, partial workspaces are very useful for per-file version control workflows.
Fully checked and partially checked directories
During the last few sections, I introduced the meaning of partially checked compared to fully checked directories in partial workspaces configurations, but I will explain them here in detail.
Consider we configure our workspace in the following way:

Note that since I didn’t select all the children of src/, it is partially checked.
Then, after a while, the repo evolved, and new changes to bar.c, foo.c appeared, and also a new file under src. Will the new changes be downloaded if I update the workspace?

No. Only the configured file bar.c will be updated to the latest version. Since the src directory is partially configured, new files under it won’t be downloaded.
Partially configured directories are designed this way to have a way to avoid new content from being unexpectedly downloaded. If you want the update to download "anything new under a given path", ensure this path is "fully checked".
How to convert a partial workspace into a full workspace and vice versa
Suppose you are working on a partial workspace, and for whatever reason (like doing a merge), you need to convert it into a full workspace. How can you achieve that?
Easy.
Run a full cm update or open the classic Plastic GUI and run an update.
The update will synchronize the workspace with the head changeset of the branch you are working on.
|
This operation can potentially download lots and lots of GBs, depending on the size of your repo. |
Now, how to convert a full workspace to a partial workspace? Run cm partial configure or open Gluon and run a configure, and the workspace will be converted.
Files that require merge during checkin
I said that partial workspaces can’t be used to do merges, but I referred to merges between different branches since we added support to deal with files that need to merge during checkin.
Consider the following situation:

-
We see how the repo evolved, and now we have up to changeset
9. -
We see the tree for changeset
9. -
And we see the current configuration of the partial workspace: Only
bar.cis "in sync" with changeset9, butfoo.candnew.care not. -
I didn’t draw a "home icon" on any changeset in the Branch Explorer diagram because the workspace is "not" in a given changeset, as you know by now. The workspace has parts and pieces from different changesets, but it is not clearly in sync.
-
Finally, I marked
src/foo.cin a different color to reflect that it was locally modified.
Now, we want to checkin src/foo.c. What is going to happen?
Plastic is going to merge your local changes of foo.c (made based on revid 03) with the latest foo.c revid 25 on head (changeset 9). Actually, in single branch merges, it is possible to simulate per-file merge tracking, and that’s what Plastic does here.
Let me explain in more detail with a diagram:

Plastic accurately assumes that:
-
The file changed in the workspace is the source contributor of the merge.
-
The file in head is the destination contributor of the merge.
-
The parent of the locally modified revision (the one it started from) is always the common ancestor. Since plastic.wktree knows that the original revision for
foo.cwas revid03, we have the common ancestor.
Now the 3-way merge can operate and resolve possible conflicts.
Of course, a merge link can’t be created because this merge happens at a "file level," and as we discussed in great detail in the merge chapter, Plastic tracks merges at a changeset level. This is not a big deal anyway, since users working with these types of merges don’t want to see merge links anyway.
|
By the way, this scenario wouldn’t have been possible if the user locked |
Xlinks in partial workspaces
One thing to keep in mind while using writable Xlinks in partial workspaces, is that they are always updated to latest on the destination branch of the Xlink and the checkins always placed in head.
Let me explain what this means.
Remember that writable Xlinks are like special symlinks to the root of a given repo in a given changeset. If your Xlink points to a repo in cset 10, the subdirectory is loaded with the content of that repo in changeset 10.
But when using partial workspaces, the workspace will always try to download whatever is latest in the branch that contains changeset 10.
This is because partial workspaces are designed for a very simplistic single branch operation where every time you update, you get whatever is latest on that branch, so we applied the same principle to Xlinks.
In full workspaces, the workspace is in sync with a given changeset, so it is very easy to know where the Xlink points to. In full workspaces, the metadata of every directory is tracked, and we know which is the revid it points to.
But, in partial workspaces, Plastic ignores the revid of the directories. Most likely, (as we saw in the previous sections), you won’t be loading something consistent with any revid of a directory, since you can have outdated files together with up-to-date ones in the same directory. For this reason, it wouldn’t be easy to know which version of the Xlink we should be loading at each moment. And hence, we decided to make Xlinks point to the head of the branch in partial workspaces.
How to learn more
By this point, you have gained a great understanding of general version control patterns, practices, and internal workings. And you also learned a lot about the Plastic SCM specific way of working.
My goal here is to point you to some good resources to learn more.
More about Plastic SCM
There are two key places to learn more about Plastic:
-
The documentation site.
-
The blog.
Materials for learning more essential info
The main guides in our documentation that you should read to obtain a deeper knowledge of Plastic:
-
Administrator’s guide. This guide covers everything about configuring the server, installing, setup locks if needed, doing backups, archiving revisions, configuring files and licenses. This is a reference more than a book to read cover-to-cover.
-
Security guide. If you configure an on-premises server, then ensure you look at this guide to learn how to perform basic security actions. This is a short guide full of examples that you can use to solve specific cases.
-
Gluon - Version control for non-developers. If you need to work on a single branch with locks, ensure you look at this guide.
-
Triggers. Use this guide if you need to customize the behavior of Plastic. You can enforce policies like ensuring branches follow a given naming convention, and many others.
-
Cloud. Learn how to use Plastic Cloud Edition or add a Cloud extension to your Enterprise Edition. It explains how our Cloud service works.
-
Find. Plastic can query branches, changesets, and other types of objects. This guide explains how to run these queries.
-
Command line. Learn how to use the command line to perform some common operations.
-
Xlinks. Learn how to do component-oriented development with Xlinks. This guide extends what we covered in this current book in more detail.
Git interop
There are two reference guides to learn how Plastic interoperates with Git:
-
GitServer. This guide explains how to set up a Plastic SCM server so that Git clients think it is a Git server. It is very good to help transition other team members from Git or interoperate with third-party systems that only speak the Git protocol.
-
GitSync. Learn how to use Plastic as a Git client and push/pull to GitHub or any other Git service.
References
Use the following only as a reference; they are not meant to be read like a book but just describe how certain features work. Armed with the knowledge in this current book, most of what the guides cover will be straightforward to master.
-
Graphical user interface. A reference of the features in the GUIs.
-
Task and issue trackers. How to configure Plastic to interact with Jira, Polarion, and a few others. Includes info on how to create your own integrations with issue tracking systems.
-
External parsers. How to develop support for new languages for the Plastic semantic features.
DevOps with Plastic
As we covered in the "One task - one branch" chapter, the entire task-oriented workflow is oriented to implement DevOps. But besides using task branches, you need a way to get the branches merged and deployed.
There are two main ways to achieve this with Plastic: Using mergebots (where Plastic drives the CI and decides when to merge and build) or delegating the leadership to a Continuous Integration system.
DevOps driven by mergebots
-
mergebot: the story of our DevOps initiative. Explains what mergebots are and how they can help you implement DevOps.
-
Add a mergebot to your repo! A practical example and tour through a working DevOps implementation driven by a mergebot.
-
Configure mergebots using config files. Explains how to manually configure mergebots without WebAdmin assistance.
-
Plastic SCM DevOps: Custom plugs. Explains how to develop plugs: The connectors between mergebots and systems such as Slack, email, etc.
-
Plastic SCM DevOps: Custom mergebots. Explains how to develop your own bots.
DevOps driven by the CI system
-
A DevOps Primer. An explanation of what DevOps is, how we understand it, and how we implement it with Plastic.
-
DevOps with Bamboo and Plastic. A practical example explaining how to implement a DevOps cycle with Plastic and Bamboo.
-
DevOps with Bamboo: connecting to Jira. Extends the previous example and explains how to take advantage of the extra info provided by the issue tracker.
-
DevOps with TeamCity. An alternative implementation of DevOps, this time using JetBrains' TeamCity CI system.
-
CyberFlex - Jira, TeamCity and Plastic integration. One of our customers shares their CI implementation.
Blog highlights
We regularly publish content on our blog, and I’d like to highlight a few blogposts that are worth reading:
-
Plastic vs. Git shows you how Plastic compares to the now ubiquitous version control and what we try to do better.
-
All the software we write. If you want to learn more about the work we do and the software we develop.
-
The story of Jet: Plastic’s super-fast repo storage. It explains why we now use Jet as the default storage and why it is faster than the other alternatives.
-
Diff math. It explains some uncommon facts of very common diffs.
-
Track refactored code across files with Plastic SCM. It explains some of the semantic features in Plastic SCM.
-
Using history to better explain branch differences. Delves into how Plastic enriches diffs with info from the file history.
Great books to read
I already mentioned some of them in previous chapters, but I think it is worth listing them together here. For younger readers, I wonder if you would prefer a compilation of blogs instead. Still, I think there’s no better way to learn than taking advantage of someone who already collected good knowledge and put it together, instead of having to do the exercise by yourself. Not that reading online texts are bad, of course, but some of the greatest foundations are easily obtained from a few good books.
-
Software Configuration Management Patterns: Effective Teamwork, Practical Integration by Steve Berczuk with Brad Appleton. It is the Bible of patterns and practices, and although it was written in early 2000. It is still unsurpassed by any other books in the matter.
-
The DevOPS Handbook. How to Create World-Class Agility, Reliability, and Security in Technology Organizations by Jez Humble, Gene Kim, John Willis, Patrick Debois. It is an easy-to-read book (unlike the previous title on Continuous Delivery by Humble), entertaining, and full of game-changing experiences. This is your book if you need to understand why automating the last mile matters or why DevOps, in general, makes sense from a business and technical perspective.
-
Clean Code: A Handbook of Agile Software Craftsmanship by Robert C. Martin. It is the team’s favorite text on how to write code. I must admit it is not my personal favorite, but it is undoubtedly a good one, and since the team here at Plastic strongly recommends it, I had to add it to the list 🙂.
-
Implementation Patterns by Kent Beck. This one is the book I prefer over Clean Code. I consider it more serious and solid. You might wonder why I recommend books that are not strictly related to version control. Well, the reason is that I view version control as a part of a wider discipline. I like to see version control, and of course Plastic, as a tool not only to control projects but also to produce better, more maintainable, easier-to-read code. And well, to achieve that goal, it is good to understand what some experts consider good code 😉.
-
Agile Project Management with Kanban by Eric Brechner. I loved this book, and it was the one that triggered us to jump from Scrum to Kanban. I read a bunch of titles on Kanban, but this was the one I really considered great. Of course, this might be a very personal choice, but I strongly recommend it. Task branches and DevOps blend extraordinarily well with Brechner’s pragmatic view of Kanban.
-
Explore It!: Reduce Risk and Increase Confidence with Exploratory Testing by Elisabeth Hendrickson. This book helped us better understand the role of manual testing and served as the basis for our validations. I always preferred automatic tests better than manual, but only because I saw many teams doing manual tests that were just scripted procedures that could be easily automated. Exploratory testing really gets the best of the human tester by making them use their creative side instead of constraining them to follow procedures.
-
Code Complete: A Practical Handbook of Software Construction by Steve McConnell. This is my all times favorite book on how to write software. It was originally written in the 1990s, but it is still one of the greatest books on the subject. It shows its age especially for young readers, but I would still recommend it as the best one. It is not only about code; if you want to clearly understand the difference between a walkthrough and a formal code review, you’ll find it in McConnell’s greatest text.
-
Agile Project Management with Scrum by Ken Schwaber. One of the originals textbooks on the matter. I asked all my students in university to read chapters 1 and 2 as the best and shortest descriptions of how Scrum works. And, it used to be a mandatory read for all newcomers to the team here too.
-
Rapid Development: Taming Wild Software Schedules by Steve McConnell. I’m probably showing my age here, but Mr. McConnell nailed it with this book, where he plotted a ton of great practices to develop software faster before the agile explosion. It is still a great book to understand how to work in iterations and avoid project management’s classic (and everlasting) pitfalls.
-
Agile Estimating and Planning by Mike Cohn. If estimating is something you need to do (you never know anymore since many teams, including ourselves, pivoted to a more organic way of working and delivering software), this book will explain great things. It includes chapters on how prioritizing features based on value, and many other interesting topics I later found repeated in other books.
-
Software Estimation: Demystifying the Black Art by Steve McConnell. Well, it is obvious by now who my favorite author is. Books on software estimation tend to be… well, ultra-boring. Cohn’s book and this one are my two favorites. T-shirt sizing and techniques like PERT to calculate best, worst, and most likely estimation and combat our natural optimism as developers are greatly covered here.
-
Manage It! Your Guide to Modern Pragmatic Project Management by Johanna Rothman. Any book by Rothman is great to read, including the one on not doing estimations ("Predicting the Unpredictable"). I used "Manage It!" as one of the textbooks for the project management classes during my six years as a university professor (together with classics like "Mythical Man Month" that I won’t list because while no list is good without this book, I don’t want to add it… well, I did it 😜). It is fully packed with great advice on how to steer projects.
-
Peopleware: productive projects and teams by Tom DeMarco and Timothy Lister. There are many books on how to make teams shine, but this is the original. I arranged our first office (and even the current one) based on the advice in this book. Much newer writings like "It doesn’t have to be crazy at work", while good, don’t say much Peopleware did decades ago.
The list could go on and on, but I just wanted to include the books that I strongly recommend, which helped me move forward as a software developer and recommend to the people I work with. Probably, "Pragmatic Programmer" should be on the list too.
Appendix A: History of Plastic SCM
It is always comforting to share why we decided to create Plastic and how everything started.
It all started with a dream… and a challenge
Back in 2002, a pair of young programmers dreamed about a better version control system while working for Sony in Belgium, making set-top boxes for what would become digital television.
At that time, it was Clearcase that was the dominant player in the large corporations. It was good, powerful, but difficult to use, super hard to configure, super slow when not properly set up (and it rarely was), and extremely expensive.
The other options were mainly Perforce, which was already becoming a myth of its own, Subversion, CVS was still around, and a little bit of Visual Source Safe in the Windows world.
We wanted to come up with something as good as Clearcase (what captured our imagination was those dynamic views implemented as versioned virtual filesystems) but more affordable than Perforce and, of course, easier to use and install than any of the alternatives.
Good branching and good merging had to be there too. And, the oldest of you will remind that it was not an easy proposal at the time because many were still singing the "branches are evil" song… exactly with the same software years later they used to say "branches rock" (ahem, Perforce).
Getting real
It is one thing to toy with the idea of creating a new product and a very different one doing what is necessary to make it happen.
For us, it happened in 2004, after a couple of years of thinking about options, with some peaks of intense activity and valleys of total calm. We decided to write a business plan and try to find some investors. It was well before the kick-started is cooler wave we are into now. And, we really thought: If nobody is going to put money into it to build it, it means it is not worth the effort.
So, we learned about business plans, carefully crafted formats (all so out-of-date by these days lean standards), presentations, elevator pitches, numbers, and all that. Of course, time proved it was all entirely wrong 😃.
A dream comes true
I quit my previous job around March 2005 to focus on a version control consulting business full-time. Long gone were the days of Sony, and this move happened after a couple of years working as CTO for a small company building and selling an ERP.
We already had some contacts with potential investors since late 2004, lots of pitches, tweaks to the plan, and participated as speakers in a few conferences, trying to build us a name as version control experts.
It was a sunny morning at the end of June 2005, and we had a meeting on the 23rd floor of the city’s tallest building. We had a few meetings before with Mr. VC. (He’s quite shy, so I’d better not share the name and just use VC for venture-capitalist.) He reviewed the numbers, and he was enthusiastic about the project and also had a huge amount of concerns. That morning we reviewed a few more numbers with the help of his assistant, and he suddenly said: "well, I just want you to know this is going to happen". I was speechless.
Years later, I tend to take it for granted, but when I take a moment to remember that morning when we raised our first almost-half-a-million euros to build Plastic with nothing more than a few numbers, documents, and not a single line of code… yes, it was a dream come true.
What came after that was a very intense year. The company was officially created in late August. The office set up at the beginning of September. The first two engineers (they are still here) joined in October. Then months of hard work, but with that feeling every morning was Christmas, and you had a bunch of presents to open. Good old days.
We started using Plastic internally on February 23rd, 2006. Not long after, we had our first public presentation to a local audience. And Plastic 1.0 was officially released in November 2006 at Tech Ed Developers that luckily happened to be in Barcelona that year, only a 6-hour drive from our place.
Códice and Plastic
We named the company "Códice Software" because we wanted to have something that sounded Spanish in the name (that "ó"), and at the same time, we were fascinated by the beauty of code. A codex (códice) was a way to bring something ancient into modern-day technology. (Well, it was also when the book and movie the Da Vinci Code came out, so… you name it).
With Plastic, it was different; we wanted a name that was easy to say in any language, didn’t have a bad meaning, and somehow had a connotation that the product was flexible and a container to protect the code. Plastic seemed right. Of course, the .com domain was taken, and SCM was a good choice. SCM (Software Configuration Management), was a serious thing to do back in the ALM days. Now, I prefer to think of SCM as simply meaning Source Control Manager, but that’s a different story.
Fast forward 15 years, and a recent awareness campaign of the National Geographic that reads "Planet or Plastic" makes me wonder if it was the right name 😃
Plastic 1.0, 2.0 and first international sales
2007 and 2008 saw our first customers coming in. Well, the first paying one happened before the end of 2006, just a few months after the official launch if I remember correctly, but I think he didn’t actually pay until a few months later, already in 2007.
As I said, we started getting visitors, evaluators, doing all kinds of wrong things on the sales and marketing side, and closing some deals.
I always thought Plastic was too expensive for small teams back then and that it would have been better to give away tons of free versions, but we had bills to pay, and cash flow was king. Yes, probably short-sighted but I’m not sure we had any options.
We got our first customers outside Spain in late 2007 and our first salesperson in the US in early 2008.
We actually achieved Capability Maturity Model Integration (CMMI) Level 2 in 2007 and became the first Spanish SME to do so, combined with the fact that we were one of the few that achieved that certification using SCRUM; we grabbed some local headlines!
VC time
We soon started to realize that we would need additional funding. We were about seven to eight people in 2008. We tried several options and then met, by total chance, Bullnet Capital, a venture capital firm focused on high-tech companies. They liked what we were doing way out in nowhere in Boecillo Park, and things started to move forward.
I remember when we got the go in October 2008, and suddenly, the world economy started to crash. Every single day there was bad news, so we were horrified at the thought that we would never get the investment. Fortunately, the events of 2008 didn’t have much to do with Bullnet, and the money was in the bank in early 2009.
Growing up – the road to 4.0
Since then, we have tried many different things. Some went fine, some others didn’t. We had a full 5-person sales team in the US in 2010. We tried PR, analysts, direct marketing, targeting enterprises, email marketing…
Plastic was growing up from 2.0 to 3.0, and then the long road to 4.0 started.
I haven’t mentioned it yet, but our first business angel decided to invest in us almost the same month the first Git was released! A version control platform made by Linus Torvalds himself. Sounded like trouble, and actually, it was.
Versions up to and including 3.0 all implemented per-item merge tracking. The thing deserves its own series on its own, but it basically means that you can merge a single file from a branch, checkin, then merge next. It was super-flexible but a pain in terms of speed: You merge 20k files, you need to calculate 20k trees. This is what Perforce still does and the reason why its merging is slow. And exactly the same reason why we have replaced Clearcases all over the world because of their "hours to complete a big merge". The opposite approach is per changeset merge tracking, and that’s what Git did and what we decided to do in mid-2010. It was a huge redesign and a huge risk. Time proved that we were right because it allowed us to easily sync with Git and speak their protocol.
Soon after releasing the first betas of 4.0, we got our first +1000 seat operation in South Korea. A mobile phone manufacturer decided to replace their Clearcase with Plastic. We grew popular thanks to these folks. 1000 developers on the same small set of repositories (less than 10), all working on a single project. Repos contained everything from the Linux source code (Android) to the quake code (don’t know why, a game or a test?) to grow larger than 700k elements on a single working copy.
Plastic graduated as a scalable version control capable of dealing with big loads. It wasn’t hard to convince the skeptics after that 🙂.
A mature solution
2012 till now, saw Plastic 4.0, 5.0, 5.4, 6.0, 7.0 and new products spawning like SemanticMerge, where we finally released all our ideas about how to do better merges.
The frantic early days are now long gone, although most of the spirit (and team members who made it happen) are still here.
When we look back, we see how crazy it was when we called a team of ten large and how nowadays the dev team is not even notified if a customer with +200 users signs up until the next all-together meeting.
Of course, most of the greatest features and improvements happened in this latter period and are still happening every day. We learned a lot about making things simpler, about product design, testing, optimization, performance, merge cases, merge tools, and all the things that, together, make Plastic.
We are still the smallest team in the industry creating a full version control stack, evolving it, and ensuring it is worth it compared to the huge alternatives like GitHub/Lab and the likes.
But, from the story telling point of view, I think you get a good idea of how Plastic was created and evolved over the last few years.
Appendix B: Pattern files
— Chapter by Miguel González
Pattern files are plain-text files that contain rules, one per line, to match files according to their paths. There are currently two kinds of pattern files in Plastic: The filter pattern files and the value matching pattern files.
Filter pattern files
These pattern files apply to the workspace tree or pending changes to specify how items should be filtered.
These include:
-
Ignored files (
ignore.conf) -
Cloaked files (
cloaked.conf) -
Hidden changes (
hidden_changes.conf) -
Writable/read-only files (
writable.confandreadonly.conf)-
These two files apply to the same action (set the item as read-only)
-
The first one (
writable.conf) takes precedence over the second one (readonly.conf)
-
Each of these files contains one pattern per line. Plastic SCM will check the path of each item to see if it’s affected by the set of rules. You can comment lines by placing the # character at the beginning of any line.
|
Keep in mind that any filtered directory will filter their complete subtree. This means that if |
Rule types
- Absolute path rules
-
Allows you to match a single file or directory:
# The following would match the *complete workspace tree*: / # The following would match: # * /src/main/test # * /src/main/test/com/package/BasicTests.java /src/main/test # The following would only match: # * /src/lib/server/Main.java # But it would skip these: # * /Main.java # * /src/lib/client/Main.java /src/lib/server/Main.java - Rules with wildcards
-
You can customize the Absolute path rules with wildcards:
-
*will match any number of consecutive characters except the directory separator/ -
**will match any number of consecutive characters, including the directory separator/ -
?will match a single character, excluding the directory separator/
# The following would match: # * /src/lib-3/main.c # * /src/samples/number-3/main.c /src/**-3/main.c # The following would match: # * /doc/public/toc.tex # * /doc/public/chapter-1.tex /doc/public/*.tex # The following would match: # * /src/lib/code.c # * /src/lib/coda.c /src/lib/cod?.c -
- Catch-all rules
-
A subset of the rules with wildcards, these rules are equivalent and they will match the complete workspace tree:
-
/ -
* -
/* -
*/ -
** -
/** -
**/
-
- Item name rules
-
Matches files or directories according to their names.
# The following would match: # * /src/lib # * /src/lib/client/main.c # * /src/lib/test # * /references/lib # * /references/lib/libgit2.so lib # The following would match: # * /src/lib/references.c # * /references.c # * /doc/main/references.c references.c - Extension rules
-
These rules match files according to their file extension.
# The following would match: # * /src/main/java/com/samplepackage/Main.java # * /examples/ReferenceList.java *.java # The following would match: # * /bin/client/resources/core.en.resx # * /out/bin/server/resources/networking.en.resx ^*.en.resx$ - Regular expression patterns
-
When everything else is not enough, you can fall back to regular expression matching. The only requirement for this is to ensure that the pattern starts with the line start symbol for regular expressions (
^) and it ends with the line end symbol ($).# The following would match: # * /src/doc/sample-3528.txt # * /sample-1.txt ^.*\/sample-[0-9]+.txt$ # The following would match: # * /bin/dir-0xC0FFEE/main.c # * /publish/bin/dir-0xDADA_/backend.cpp ^.*\/dir-0x[A-F0-9]+_?\/[^\/]+$
Include / Exclude
All rule formats we previously discussed work positively; if the item path matches the rule, the result is a positive match, and Plastic SCM will apply the filter to that item. However, there are situations where you want to use the rule negatively, that is, exclude the item from the filter. This is particularly useful when you wish to filter a directory but keep some of its files out of the filter.
These rules are identical to the regular inclusion rules, but start with the ! character.
!/src/lib
!/main/bin/compiler.exe
!*.h
!references
!resources.*Pattern evaluation hierarchy
Plastic SCM will try to match the path of an item using the patterns in the file in a predefined way. This means that some pattern formats take precedence over others rather than processing the patterns in the order they appear in the file.
-
Absolute path rules that match exactly
-
Catch-all rules
-
Name rules applied to the current item
-
Absolute path rules applied to the item directory structure
-
Name rules applied to the item directory structure
-
Extension rules
-
Wildcard and Regular expression rules
- Directory structure matching
-
"Directory structure" means, in the list above, that the rules are applied to the full list of directories above the current item.
For instance, if the current item path was
/src/main/java/com/codicesoftware/sample/SelectedItem.javaany of these two rules would match its directory structure:
/src/main/java codicesoftwareThe first one,
/src/main/java, partially matches the directory hierarchy of the current item. The second one matches the name of one of the parent directories of the current item. - Include / Exclude rules order
-
Exclusion rules (ones that start with
!) take precedence over include (or regular) rules, so they are matched first.There are two exceptions to this. The first one applies to absolute path rules that match exactly the current item. In this case, the include rules are applied first.
For example, if we used these rules:
!/ /src/test/testdata.zipThe item
/src/test/testdata.zipis filtered even if we explicitly prevented the whole workspace tree from being filtered.The second exception applies to absolute path rules applied to the item directory structure. In this case, the most precise rule is the one that takes precedence.
For example, if we used these rules:
/src !/src/client /src/client/binFiles like
/src/build.shor/src/client/bin/output.sowould be filtered, but files like/src/client/socket.cwouldn’t. This is because/src/client/binis a more precise match than/src/client, which is, in turn, more precise than/src. In this case, you can also consider precision as the length of the matched substring.
We’ll use this tree in the next few examples:
.
| #build.txt
| Makefile
+---doc
| | #build.txt
| | Makefile
| | manual.pdf
| +---pub
| | chapter1.epub
| | chapter2.epub
| \---src
| chapter1.tex
| chapter2.tex
| toc.tex
\---src
| #build.txt
| operations.build.sh
| README.txt
+---client
| | command_line_args.c
| | main.c
| \---gui
| window.c
\---server
libgit2.so
socket.c
socket.hTo see the directory structure matching in action, let’s say we’d like to filter all but the /src directory, but inside of it, filter the /src/client/ directory as well. Finally, we’d like to keep /src/client/gui. Here’s how:
/
!/src
/src/client
!/src/client/guiThis is the resulting tree:
.
\---src
| #build.txt
| operations.build.sh
| README.txt
+---client
| \---gui
| window.c
\---server
libgit2.so
socket.c
socket.hAs you see, the longest matching rule takes precedence over the rest when only absolute paths are involved.
If we added this rule to the set above:
*.hIt wouldn’t affect /src/server/socket.h because it’s excluded by !/src, and exclude rules take precedence over include rules.
There’s a way to filter files affected by an exclusion absolute path rule. However, that requires exact path matching.
To filter /src/server/socket.h, we just add that particular path to the set of rules:
/src/server/socket.hThat’s the only include rule that takes precedence over all of the rest.
If there’s a recurring file name that appears over and over again, you might want to filter it using just the name:
MakefileThe rule above will filter all Makefile files in your workspace.
What if we’d like to apply a more complex filter, such as "all files with oc in their names, and a single-letter extension"? Easy, use wildcards!
**/*oc*.?This would filter out /src/server/socket.h and /src/server/socket.c but it wouldn’t match /doc/src/toc.tex because its extension has 3 characters!
That’s also the way to match files whose name starts with the # character. As we said before, that’s how comments are specified… so how would you filter all those #build.txt files?
One way to do it is using extension rules:
*.txtBut, that would filter all text files in the tree. To make it more precise, use this instead:
**/#build.txtValue matching pattern files
This kind of pattern files assigns a value to items that match the specified patterns. It’s suitable for functionality that doesn’t work in a yes/no fashion, such as assigning a file type (binary compared to text).
These include:
-
Compression type (
compression.conf) -
EOL sequence conversion (
eolconversion.conf) -
File type (
filetypes.conf)
These files also contain one pattern per line. Plastic SCM will check the path of each item to find out whether it matches any of the rules to return the assigned value.
Lines in these files will contain rule/value pairs. The separator sequence changes across files:
-
filetypes.confuses:as the rule/value separator -
compression.confandeolconversion.confuse whitespace as the rule/value separator
Pattern types are limited to four: file extension, file name, file path, and wildcard rules.
You can comment lines by placing the # character at the beginning of any line.
Rule Types
- Extension rules
-
These rules are the exact extension of the files to match. This applies to the characters after the last
.in the file name.Example 6. compression.conf.png none .c zip .cpp zip
Remember that values such as
.en.resxor.in.htmlwon’t match any file because the matching engine will receive.resxand.htmlas the item extension for those examples.In this example, files such as
/theme/images/background.pngor/wwwroot/img/top1.pngwill never use compression, whereas files such as/src/client/main.cppor/src/lib/core/threadpool.cppwill always use GZip compression. - Path rules
-
These rules compare the full path of the current item with the value of the rule. If both match, the process will assign the related value of the current rule to that item.
Example 7. eolconversion.conf/src/main.c auto /lib/core/Calculator.cs CRLF /src/main/java/com/codicesoftware/sample/Main.java LF
These type of rules is very easy to see in action, since the rule matches exactly the item path.
/src/main.cwill use automatic EOL conversion,/lib/core/Calculator.cswill convert all its EOL sequences toCR+LFand/src/main/java/com/codicesoftware/sample/Main.javawill convert them toLF. - Name rules
-
Similar to the path rules, the name rules use exact matching of the item name.
Example 8. filetypes.confheader.png:bin README.md:txt
Here, files like
/my-app/wwwroot/img/header.pngand/images/header/header.pngwould always be set as binary, whereas files such as/README.mdor/src/doc/README.mdwould be always set as text. Any other file would have its file type detected from its name and contents. - Wildcard rules
-
Finally, path rules can be enhanced with the special sequences defined in "Rules with wildcards" in the Filter pattern files section:
-
*will match any number of consecutive characters except the directory separator/ -
**will match any number of consecutive characters, including the directory separator/ -
?will match a single character, excluding the directory separator/
Example 9. compression.conf/**/images/**/*.* none /src/client/core/lib_01.? zip
If you apply this compression filter, files like these will never use compression:
-
/wwwroot/dist/images/mandatory-intermediate-directory/img.png -
/doc/images/builder/readme.txt
These other files will always use GZip compression:
-
/src/client/core/lib_01.c -
/src/client/core/lib_01.h -
/src/client/core/lib_01.o
-
Pattern evaluation hierarchy
Plastic SCM will try to match the path of an item using the patterns in the file in a predefined way. This means that some pattern formats take precedence over others, rather than processing the patterns in the order they appear in the file.
-
Path rules
-
Name rules
-
Extension rules
-
Wildcard rules
compile.exe:txt /src/main/bootstrap/compile.exe:bin
In this example, /src/main/bootstrap/compile.exe would be binary, but any other compile.exe file in the tree (for example, /build/release/compile.exe) would be text.
/src/java/**/*.* LF .java:auto
In this other example, any file under /src/java/<subdir>/ would have its EOL sequences forcefully converted to LF. For example, /src/java/main/com/sample/README.txt or /src/java/test/resources/res.xml
Also, all .java files in the tree would have their EOL sequences handled automatically, for example, /main/Program.java or /src/module/first/Connection.java
And finally, since exception rules take precedence over wildcard rules, .java files inside /src/java/<subdir> will also have their EOL sequences handled automatically. For example, /src/java/main/com/codicefactory/writers/PlasticStreamWriter.java or /src/java/test/complex/ExtremelyRareScenarioTest.java.
Appendix C: Alternative branching strategies and solutions to frequent problems
We always recommend task branches blended with trunk development as a straightforward and effective way of working, but other alternatives are worth considering.
Not all teams can directly jump to a practice requiring effective automated testing and a CI system. Sometimes, tests are not automated, or builds are too slow.
This chapter describes alternative working patterns and how to use them as an alternative to task branches or as a starting point to evolve to simpler and more efficient practices.
Branch per task with human integrator
Cycle definition
Consider this as a prequel to the "Branch per task pattern" I explained at the beginning. Everything is about one task per issue in the issue tracker, tasks being independent, short, checkin often and so on holds true. The only difference is in this variation, the integration phase, the merge, is performed by an actual team member instead of a mergebot or CI system.
We used to work this way. In fact, we followed this pattern for years with a great degree of success. Task branches combined with an integrator in charge of merging every branch back to the main or the release branch at hand. We only moved past it when we finally automated the merge process with mergebots.
I think I’ve drawn the following graphic a hundred times over the years and explained it in many different places, from meetups and product demos to classrooms during my days as a university professor.

-
It all starts with a task, usually coming from the sprint backlog if you are using scrum, but it can be taken from a Kanban board or any other project management mechanism you use. As I described in the chapter about task branches, it is important to note how every single task branch has a one-to-one relationship with an entry in the issue tracker. Depending on how prescriptive and hierarchical your team is, everyone will enter tasks or only some designated members.
-
Every developer takes one branch, works on it, and marks it as done when they finish. Tasks are tested individually. It can happen thanks to a CI system (recommended) or because of tests manually triggered by developers.
-
Then, at a certain point, a stack of finished tasks exists. Of course, the smaller the stack is, the fastest your team will move. And here is where the integrator enters into the scene. The integrator takes the list of pending branches to be merged and merges them, resolving any possible manual conflicts thanks to their project experience or asking the involved developers to help. Fortunately, the percentage of manual conflicts is small, and conflict resolution is normally the smaller of the work efforts in the integrator’s bag.
-
Once the branches are merged, the integrator creates a "pre-release" and launches the test suite (with some ad-hoc batch system or with the help of continuous integration software).
-
When all tests pass, and a new version is created and labeled, the developers will use it as starting point for the new tasks they’ll work on.
How it looks like in practice
The day of the integrator typically starts with a list of tasks to be merged. The integrator takes them from the issue tracker (list of finished and not released tasks) or through a query to Plastic SCM if branches are tagged with their corresponding status.

In the figure, the integrator has to take care of merging task1213 and task1209. They can start with task1213 and merge it to main. In this case, there’s no possible conflict between main and task1213.

Before actually confirming the merge (checkin the result of the merge from his workspace), the integrator will typically build and test the project. This really depends on how fast tests are. In our case, we used to run the test suite manually after every task branch was merged to main and before checkin. This was before having tenths of hours of automated tests when the suite just ran in about 5-10 minutes.
Of course, having a human integrator doesn’t mean they have to trigger tests manually. For example, a CI system connected to the repo could have tested task1213 and task1209 so these two branches would only be eligible if the tests pass. A caveat, though, and we experienced this ourselves, is that those branches are typically tested in isolation instead of merged with main. And, if you already automate that step, then the manual integrator is rendered obsolete (as happened to us) because there’s no real reason not to let it merge back to main too.
Anyway, in our human integrator scenario, the integrator checkins the merge from task1213 to main once they consider it is good enough. Notice the integrator doesn’t label the changeset because another task is queued to be merged. Since the process is manually driven, grouping tasks makes a lot of sense (and it is a good reason to automate the entire process and avoid turning new versions into events that can slow down the whole cycle).
Then the integrator decides to merge task1209, run tests, checkin, and if everything goes fine, label BL102, which will be used as the next stable starting point for the developers and be published and/or deployed to production.

When I say the new BL102 will be used in the next iteration, I don’t mean developers were stopped while the release was created. They could safely continue working on existing tasks or create new ones starting from BL101 since BL102 didn’t exist yet.
The branches started from BL101 don’t need to be rebased to BL102 unless they are in conflict, and since there is a human integrator, this merge is normally not requested because the integrator will solve the conflicts during the merge phase.
While merging task1209, the integrator might have found conflicts that required manual intervention. In small teams, the integrator can play a rotating role among experienced developers, so they’ll be able to handle most of the merge conflicts. If not, if the integrator doesn’t really know how to solve a given conflict, they’ll ask the author of the changes to reconcile the changes correctly.
The integrator decides to checkin after the merge of each task branch, but in Plastic, they are not forced to work this way (as they are in Git, for instance).
An alternative merge scenario would be as follows, where both task1213 and task1209 are merged into the same changeset.

In our experience, the disadvantage of doing this with manual merges is that you can be forced to undo more merges that you would like to. Suppose you have ten branches to merge. You have been building and launching tests manually for each of the first six. Then, the tests of the seventh fail after they are merged. If you undo changes now, you’ll undo the six previous merges. While the result looks cleaner because there is a single changeset for all the branches, it can be a great inconvenience if something fails.
Pros & cons
Having a human integrator has several pros and cons.
| Pros | Cons |
|---|---|
There is always someone in control of all merges, so there are few chances someone merges quick and dirty because they are in a hurry and need to leave. |
It doesn’t scale. I don’t mean this is only for small teams. I’ve seen it happen in large ones too. The problem is that the cycle you can implement is not fast enough to achieve true DevOps. Every single manual step slows down the whole project. Creating a new release becomes an event. "Hey, Ms. Integrator, please wait for |
Most team members don’t need to merge daily, which greatly simplifies onboarding. Developers without a solid understanding of merge can easily work just doing checkins to their branches, not worried about how they’ll be merged. |
Sometimes (not always), some merges can become complicated since developers are not preoccupied with solving them themselves. |
With a fully automated cycle driven by the CI system or a mergebot, you get a scalable process where releases happen continuously.
The only downside I can think of is that every developer will need to eventually merge down some changes to solve a conflict, something they were shielded from with a human integrator. And, of course, since everybody can merge, there’s not the same level of confidence that a wise integrator will always get the merges right. But good test suites seem to handle that pretty well. The world has moved towards automation for a reason.
When to use it
A good branch per task cycle with a manual integrator is a good first step towards full continuous delivery and DevOps. I wouldn’t use it as a final goal but as an intermediate step or starting point.
If you’re not using any sort of branching pattern and experience frequent broken builds and regressions, this workflow will help you move forward if you don’t have enough tests or infrastructure for a fully automated alternative.
Mainline only for unmergeable files
Mainline is when an entire team directly does checkins on to a single branch, typically main.
It is easy to confuse this with trunk-based development, although I believe they are radically different.
Most teams doing trunk-based nowadays don’t checkin directly to main. Instead, they use proper task branches if they are in Plastic, or they commit locally then push if they are on Git. In this second alternative, their local branches are their real working branch (the equivalent to the task branch in Plastic, although less organized, in my opinion). They never checkin to the master on the remote site simply because Git doesn’t allow it by design.
That being said, I’d only use mainline to work with files that need to be locked because they can’t be merged, as we saw in "Locking: avoiding merges for unmergeable files".
Task branches don’t impose a big burden, come with lots of flexibility, and are way better than mainline in all circumstances except when locking is necessary.
Release branches
All through the book, I used the main branch as the integration spot for the task branches. But, we often find teams that use release branches to stabilize the new versions before actually releasing, or simply have a spot to safely and quietly perform the merges before moving to main.
A typical scenario with release branches is as follows:
-
Task branches start from the stable release, typically labeled on
main. -
But they are merged to a release branch instead of directly to
main. -
This allows the team to keep
mainclean. -
And releases to progress and take its time.

We used release branches ourselves very often before we moved to full automation mode.
The release branch was useful for the human integrator because:
-
Creating a release took some time, so if something super urgent happened, main would be clean to start a different one with the hotfix in parallel.
-
If things go wrong with tests or the code itself or last-minute fixes, the integrator could apply small changes directly to the release branch without passing through the entire cycle. This is, of course, a slight cheat, caused by the fact that manual releases took time.
I usually don’t recommend this model anymore if you implement a fully automated cycle for many reasons:
-
It is easier to automate a simple workflow where task branches are simply merged to main, without creating intermediate steps. Here laziness matters 🙂 but also keeps things simple.
-
If new releases can be created continuously, one per task branch, it doesn’t make much sense to create an intermediate new integration branch. I mean, release branches make sense when you group tasks together, but automation renders that irrelevant because every single task can be merged, tested, and released. Hence, with automation, these intermediate steps don’t make much sense anymore.
They can be very useful, though, if you can’t achieve full automation for whatever reason if you need to group branches to be tested because tests are too slow, or even in more complex cases where several releases need to be created in parallel from the same codebase.
Maintenance branches
What is the best way to maintain older versions of your product while you evolve a newer one? Branching can definitely help here, but there is a big warning to keep in mind: The actual limitation to handle parallel versions is not the version control but the actual amount of work your team can handle. Dealing with parallel versions is extremely time- consuming and can expand to use all the available resources until nothing is left to produce new meaningful work.
A typical maintenance layout
Here is the typical layout and evolution of a maintenance branch:

-
The
mainbranch was version3until version3.0.151. -
At this point, a new branch
fix-3.0was created, starting from3.0.151. -
From there, main continued evolving, this time turning to
4.0. New versions4.0.1,4.0.2, etc. are created later. Most likely, some of the initial4.xversions were not yet public to everyone, or even not public at all, but they are created frequently due to the result of the development iterations, exercising the entire DevOps cycle. -
In parallel,
3.0continues evolving, usually only with bug fixes. This way,3.0.152and3.0.153are created and deployed to production or delivered to customers depending on the nature of your software. -
Note how the new
3.0versions are always merged tomain. This is because a bug found on a maintenance branch also affects the development version, so it needs to be applied.
Of course, the Branch Explorer diagram above is a simplification that only shows the primary branches. A more realistic view would be something like the following diagram shows: Short-lived branches all around being merged to 3.0 or to main depending on whether they apply to one or the other line of development.

Simple proposal for maintenance branches
This is how I summarize our proposal to deal with maintenance releases:
-
Keep the evolution on main. Other alternatives include evolving the new
4.0on a dedicated branch and merging it to main only when it is stable enough and then swapping lines there, creating the3.0maintenance branch from the last changeset before the4.0merge. We have done that ourselves several times over the years, but honestly, I now consider it an overdesign. It is much simpler to reduce the number of branches to keep it simple. -
Keep maintenance on
fixbranches. Branch off when you decide from this point onwards that main will be the next version. It can be the moment before activating an important feature, a big UI change, etc.
The following figure summarizes the proposal:

When to merge maintenance branches back
There is a really straightforward rule of thumb:
-
You can merge
fix-xxxback tomainas often as you need to apply new bug fixes or improvements. -
But you can’t ever merge
maintofix-xxx, or you will convertfix-xxxin your new version, and that’s something you don’t want to do.
This might sound obvious, but I want to make it crystal clear.

You never merge down from main to fix-1.0, never from main to fix-2.0, and never from fix-2.0 to fix-1.0. Otherwise, you won’t be turning 1.0 into 2.0, or 2.0 into 3.0, etc.
Now, the merge upwards from older to newer releases is safe and should happen often.
One of the challenges you find when you have several open parallel lines of work is when to perform these merges.
Our internal rule is:
-
Treat
fix-xxxbranches as task branches. Whenever there is something new onfix-xxx, merge it to its parent branch. -
This way, we eliminate the risk of missing an important fix made on an older release.
Not sure if I really made it clear. The alternative to this "merge immediately" might be: remember to merge (or automate it using your CI) the fix-xx into its parent the next time you create a new release on the parent. Ok, I’ll try again with the example above: Whenever you make a new version in main, remember to check pending merges from fix-2.0. This alternative mainly works for scenarios with human integrators because if your process is fully automated, there’s not really a need to delay the merge. As soon a new version is ready in fix-2.0, it should trigger a new one in main.
As you can see in our example, a new version labeled in fix-1.0 will trigger a cascade of new versions in fix-2.0 and main. That’s pretty normal because it can be a bugfix in code still shared by the three versions.
Problems with maintenance branches
As I said at the beginning of the section, maintenance branches are problematic. And I don’t mean they are from a branching perspective; Plastic will treat them as it would with any other branch but from an organizational level.
Maintenance branches were a hot topic in desktop software because new versions were released only a few times a year or even every few years, and upgrading had a licensing and business impact.
Nowadays, the Cloud and SaaS are a reality for many teams, and the branching strategies were greatly simplified in that sense. You don’t really expect to use the previous version of a hosted service, but to seamlessly use the latest version as soon as you keep paying the subscription.
Under that premise, it is less and less worthwhile to maintain version 3.0 when 4.0 is already in production since there’s no business need for that.
In the end, the entire DevOps philosophy is all about achieving a fast pace of small changes that go immediately to production, so the big jumps between versions become something of the past. It is more about a single main branch evolving through time than about taking care of parallel versions.
That being said, there are a few things to keep in mind:
-
Not all teams develop SaaS cloud-hosted software, so maintenance releases can still be a big thing for many of you.
-
Even in Cloud, sometimes it is important to roll out two different versions to production, so the new one is deployed only to a designated group of users to validate it, while the bulk of users continue with the older one. If the test takes a few weeks to complete, you likely need to support parallel evolution in the two versions. Of course, a maintenance branch for the old one will help. But the good news is that it is very likely that this maintenance branch will be extremely short-lived (a few weeks at most), and you’ll rarely have to deal with more than two parallel lines of development.
The big problem with maintenance branches is when they start to pile up. It is no longer a big issue for most teams, but some enterprise software and server and desktop applications can still be impacted.
I mean, what happens if every few months you launch a new major version due to business requirements, and then you find yourself having to maintain 3.0, 4.0, and 5.0 while evolving the upcoming 6.0?
The problem, as I repeatedly said, is not really the branching and merging themselves, but the fact that your team will have split its focus to develop in four different lines of work (unless you have a dedicated team for each version, which in my experience is a nice rarity that almost nobody benefits from).
This split in focus means dealing with continuous context switches (3.0 might be arcane and odd by the time 6.0 is under development) and a huge negative impact on productivity.
I had the chance to visit teams where they had the impression (backed by numbers) that they could not get anything new done because they were constantly fighting too many open fronts to maintain old releases.
The solution doesn’t come from a technical alternative but from a strategic decision: Try to minimize the number of open versions. Yes, this is much easier said than done, but if you are the CTO or technical lead, you should really strive for this simplification. Does the business benefit from not upgrading customers to newer versions if they don’t pay for the upgrade? Can’t sales simplify the process? Maybe target more aggressive discounts to ensure everyone benefits from the newest and better versions instead of being stuck with an old dinosaur?
Even in the most organized and test-aware teams, a version from five years ago will be lacking. Probably, the old test suite is now harder to run because of some infrastructure changes (the old tests were not ready to run in the cloud while the new ones can), or the old version has far more tests than the new one, etc. So, touching the now outdated version is a nightmare for everyone. It doesn’t mean branching it is harder than creating a task branch on the current version. Plastic doesn’t care about that; it is about the actual cost for your team.
The ideal is, of course, to have a single running version and really minimize bugfixes on the old ones as much as possible (to zero if you can afford it). Probably, during the first few days of the new version being public, you still have to do some fixes or small improvements in the previous, but this is a temporary situation, and the old one will be naturally frozen in a few weeks.
Of course, there is always an equilibrium: It is better for the dev team to immediately mark old versions as obsolete when you launch a new one, but forcing all customers to upgrade might be a nightmare for them sometimes unless you ensure the transition is super smooth. Sometimes, you have a new and much better version, with a greatly improved UI and many new features, but the cost of change for some customers is high, and they prefer not to invest in the change. Telling them "no" and forcing them to upgrade might be good from a programmer’s perspective, but it would mean not really putting yourselves in the customer’s shoes which is never a good choice.
If that’s the case, you’d be forced to deal with the older release unless you really plan this in advance and ensure that upgrades roll out seamlessly and frequently to prevent big jumps down the road.
As you can see, the challenges of maintenance releases go far beyond branches and merges and well into product and project management, sales, and overall business vision.
Where to apply bugfixes
Suppose that you find yourself with two or more maintenance branches open in parallel plus the main development for whatever reason mentioned above.
What happens when a new bug shows up?
The team must find which is the older version affected and apply the fix there.
Yes, it might sound crazy and extremely time-consuming if you have many parallel open versions, but that’s why exactly you should try to minimize that number.
My advice here is:
-
Locate the older open version affected by the bug (I stress the importance of "open". It is not about being a software archeologist and finding that the bug affects a version from 10 years ago and branch from there if it is no longer supported).
-
Create a task branch from the latest on that maintenance branch.
-
Code and test the bug fix.
-
Merge it to the maintenance branch following the regular procedure, passing tests, etc.
-
Cascade merges up until main, creating new versions of each maintenance branch.
Then, it is up to you, and your business needs to decide if you release all those versions; but, from a technical perspective, you are giving a solution to the business folks, and you are covered. You give the business the right tools. Now it is a matter of using them wisely. The opposite, creating the new releases only if someone complains, is a worse choice if your process is fully automated. If it is manual, then saving time must be worth it.
Please note I’m talking about merging changes, not cherry picks.
I once visited a team developing a huge set of products based on a shared codebase, and they had a complex procedure and set of tools to cherry pick bug fixes among the open versions they had. It was extremely time-consuming and complex and hard to keep up to date and to really understand what was going on. Try to avoid that path at all costs.
How we do it with Plastic SCM
Since we develop on-premises software (we have a Cloud version too, but you can set up your own server so the upgrades are outside our control) involving servers and desktop apps, we were traditionally hit by the problem of maintaining old versions.
It was very common to try to group new features and only make them visible when the new big release came out. This was a practice we all saw promoted by the big software companies for decades, and somehow, we all had considered it to be a good way of working.
But, it had a few big problems:
-
First, we could be working for months on new things nobody was seeing. It could be November, and new teams evaluating Plastic were downloading the "stable version" from February, missing all the new improvements made during the interval. Sometimes we were shocked to see how old the customer’s version was since we were all used to the new features.
-
Constantly splitting time between doing releases for stable and new software.
The solution was to create frequent public releases weekly with both fixes and new features and roll out new things during the year instead of waiting to group them all together.
Customers are not forced to upgrade every week, of course, so they can choose their own pace.
We don’t have to worry anymore about not making things public to have a "big release with tons of changes" at a given date.
Marketing and sales still like to see major versions coming. So, what we do is:
-
Every January (sometimes it can be delayed a little bit), we change the major version. We go from 6 to 7, 7 to 8, etc.
-
The early 7.0 is exactly the same as the latest 6.0, adding the minor fixes and improvements that go into every release.
-
Over the year, the new 7.0 continuously evolves while 6.0 is frozen.
-
At the end of the year, the latest 7.0 is very different and much better than the one at the beginning of the year, but changes were rolled out progressively.
-
We lose the "surprise effect" of packaging a lot of new things together.
-
But overall it is better for everyone. Newcomers have access to the best possible version (so we don’t lose someone because they can’t see a feature that is waiting in the fridge), and existing customers see a more gradual evolution
-
Feature toggles help us ensure risky changes don’t negatively impact and let us test those changes internally or with selected customers.
Conclusion
-
Try to minimize the number of parallel open versions. If your customers are okay with just having a single version that receives updates continuously, everything will be better than trying to keep 3.0, 4.0, and 5.0 running in parallel.
-
If you really need to handle maintenance branches, keep them as simple as possible and cascade up changes creating new versions.
-
Contact us to double-check your setup. We have seen many teams over the years, and very likely, we’ll be able to help you with our experience. We’ll do our best to help 🙂.
Branching for product variations
There is a recurring request that shows up repeatedly from some teams adopting Plastic, and it is their intention to handle product variations with version control. They think branching is a natural way to handle product variations and customizations.
Usually, they have a solid business based on selling custom software to their enterprise customers. Each customer has slightly different requirements, so while a common base is used as starting point, new development needs to be done to win the deal. And the development typically takes a few months of work.
Product variations can certainly be handled with separate branches, but since I’m trying to be prescriptive to be here goes my advice: Don’t use branches for product variations, use feature flags instead.
The problem with many open development lines is quite similar to having many open maintenance versions: They tend to drain all available time. You end up spending more time applying changes here and there than doing new development.
The typical scenario starts as follows:

-
Development happened on
mainuntil a product is ready to be released to the customer. Product A versionA.1.0is labeled, and then further evolution and maintenance happens onproduct-Abranch. In my experience, the beginnings are never that clear. If we have to import an old SVN repo, the initial branch most likely didn’t happen in such a clear way, both probably well afterproduct-Ahad evolution and close to the point where productproduct-Bneeds to be released. For the sake of simplicity, I’ll keep it in this "close to ideal" form. -
Once
product-Ais out and used in production by the customer, further development happens both inmainandproduct-A. Normally,mainwill receive a great evolution to prepare for the upcomingproduct-B, whileproduct-Aonly receives minor fixes. Unfortunately, very often,product-Areceives major new features to respond to customer needs. -
product-Breaches its 1.0 version and is branched off. -
Then, the story repeats for the new
product-C. -
At this point, the team is actively working on four major branches. If they are lucky,
product-Aandproduct-Bwon’t be much trouble, and they’ll be able to focus on C and the upcoming contract or major core upgrades. If they are not, they’ll constantly be switching projects.
What I described so far is somewhat the starting point. But later, the team will see a bunch of parallel lines without any confluence at sight.

As the figure shows, the team is now dealing with four parallel lines of development. And now consider a major improvement was made on main and the person responsible for each product (typically some account manager with technical background) wants these updates to secure a renewal or renegotiate a contract. How can you apply the changes?
-
In this example, we can merge from
maindown toproduct-Csince it seems we didn’t create a newproduct-Dyet, so the evolution might well be applied to it. -
But we can’t merge (red lines in the figure) down to
product-Bandproduct-A! Why? Because then, we’d turn them inproduct-C, which normally is something teams don’t want to, very often due to stability concerns. -
If bringing changes made on
mainto the other product lines was not an issue, then frequent merges should happen frequently to push changes down to the different product lines, but that’s normally not the case. In fact, if that was the case, why would you have three different product branches?
Since merge is normally not permitted due to the issues mentioned above, teams tend to start doing cherry picks, making maintenance even worse and more difficult to track. Cherry picks, as described in the merge chapter, don’t create merge tracking, which won’t simplify later merges.
Typical challenges found in setups with multiple product branches
Here is a list of typical problems and challenges found on teams with strategies based on branches per product:
-
Somehow, they have a core that all products reuse. The core is typically developed on main. But in reality, this core is not that clearly defined and trying to componentize the project becomes an unachievable goal the team has been pursuing for years.
-
In some situations, we even found that main is not even stable (sometimes it doesn’t even build!), and stabilization is done on the product branches. This is one of the reasons why trying to unify the different products is repeatedly discarded since account managers are very scared of regressions and the negative impact on their customers.
-
Fixes are done ad-hoc on the product where they are found, and often the same fix is done more than once by different developers, with the associated wasted effort. Teams dream of a magical solution to identify and apply fixes correctly and avoid working twice.
-
Some teams even implemented some home-grown patch system to track which patches were applied to which products. Since merging between branches became a nightmare when not totally forbidden, they need to do patch-based management.
-
Teams are usually stuck with some ancient version control, like SVN or even CVS, which makes merging even worse. And somehow, they expect a new version control to fit like a glove in their environment and magically fix all their issues, which is not going to happen because their problem is deeply rooted in their way of working, not only the version control.
-
Normally, the lack of automated tests adds to the pile of problems, making every possible move or refactor almost impossible.
|
Game studios reusing an engine are not a valid example of this pattern. Different titles are sufficiently separated from each other to deserve their own evolution, and the engine is usually well defined and handled by a core team of experts. In fact, it is more common to find each game on its own repo instead of just as different branches. All game teams might make changes in the engine, but they do that on a branch of the engine repo, and those changes are merged and reviewed by the engine core team. Particular changes in the game itself, or its entire evolution are separated enough not to be reused between teams. |
Proposed solution
When we hit a situation with multiple product branches, we insist on the importance of having a standardized product without variations. If variations are a must due to business needs, then we make it clear they should implement it through feature toggles on a single codebase instead of having multiple branches.
These statements are normally shocking for the teams who expected us to develop a magical solution that simply merged all their changes and fixes in a better way.
Our proposed recipe is:
-
Start implementing automated tests. No matter how hard it sounds, it is possible, and it will be a cultural change so profound that everything will change after that. Of course, you won’t have full coverage in a few days, but little by little, in a year from now, you’ll have a solid safety net.
-
Start doing peer reviews in code.
-
Work on short task branches instead of on huge feature branches.
-
The main goal is to ensure main is stable; then, you can ensure stability in all product branches by running tests.
-
In parallel: You need to talk to the business people so they start preparing for a standard version. We are going to fight against totally customized versions for each customer. This is simply the old developer versus salesperson fight of "don’t say yes to everything" and trying to find the right balance.
-
Teams normally have an idea (and dream) for standardization of their product, sometimes even some work in progress.
-
Implement customizations as configuration: It can be through config files and feature toggles or through conditional compilation. Anything is better than fighting lots of parallel branches that will never be merged.
-
Then we move them to task branches + trunk. A single line of development (trunk) with short-lived (1 to 10 hour) task branches.
If they achieve it, teams will go from fighting four or more parallel branches to focusing on developing small incremental steps that are fully tested. This doesn’t mean they’ll be deploying to customers every day if their business doesn’t want that, but they’ll have the flexibility and the tools to do it and to be always ready to release.
Once they move to the new paradigm, step by step, as stated above, they won’t have more cherry picks, no more figuring out which products are affected by what, no more how to apply these core changes to the four product lines. All of that will simply happen auto-magically 😉.
No automated tests
Well, this is not an alternative branching strategy but a very common problem for many teams. So, I thought it would be a good idea to introduce here a possible path for a solution.
Many teams learn about task branches and fall in love with the idea, only to get demotivated because they don’t have any automated testing and hence can’t implement it.
What can you do if this is your case?
-
You can implement "Branch per task with human integrator" from day one, but it will only work if you really start implementing automatic tests.
-
The manual integrator will help you implement the concept of short tasks and evangelize the whole team on its benefits.
-
Every task will be code reviewed (no reason not to do it), which will unlock collective code ownership. Of course, you’ll catch bugs and establish a common interest in code quality. The senior members will also continuously train the less experienced developers.
-
You’ll interiorize the concept of frequent releases, short tasks, code reviews, and stable starting points for new tasks.
-
You can implement some sort of validation for each task and also manual validation of the new versions to avoid regressions.
Of course, this is a compromise to get you started. None of this will hold together if you don’t start building a solid foundation through automated tests. You don’t truly believe in task branches if you don’t believe in automated testing.
To get started with tests, check the section "Automated tests passing on each task branch".
Slow builds and slow tests
By slow builds, I mean both projects that take hours to build and test suites that take hours to run. In some industries, especially in long-life projects based on C++, it is not uncommon to find that rebuilding the project can take 6 to 10 hours or even more. Normally, they mean a full rebuild, which is not that common since most of the intermediate compilation objects are reused, but even a faster build in a CI system can take a few hours.
These slow builds greatly complicate the pure task branch cycle, where every task is expected to pass the full test suite to ensure it is ready for production.
This is the solution we propose:
-
Stick to task branches and testing each branch. Since each branch can’t afford the, let’s say, 10 hours of build and test, select a faster and smaller subset. It is always possible to select a minimum test suite that can be run in about one hour. If the problem is just the build that takes too long, the CI system can be set up so that it reuses most of the intermediate objects or takes advantage of a build accelerator.

-
Once the lighter test suite passes, the branch
tsk507is merged tomain. It can be used as a starting point for other task branches since it is "good enough" as it passed the minimum test suite. Alternatively, you can stick to only allowing branch creation from the last stable build,BL937, in this case.

-
We prefer not to create a label for each of these "candidate versions" if possible, and we simply set an attribute "build" with the number of the current build. Every changeset on main is a valid "release candidate".

-
After a few more tasks and bug fixes, branches are merged, the
mainbranch will look like the next figure shows. At this point, we have a group of four branches that can be used as the basis for a new public release. Ideally, the smaller the group is, the better the chance is to achieve agility. But, if builds take too long, then maybe it is good to have a group of five to ten branches. In our particular case, our mergebot triggers the build with four branches or if no branches are waiting to be merged (which usually happens after working hours, which ensures the mergebot uses its time wisely at night).

-
If the entire build and tests pass, then the changeset
2117used to group the four branches will be labeled accordingly, as the figure shows. Of course, meanwhile, the project continued running, and now there are new changesets on main waiting to be released.

-
In case the full build failed, the changeset
2117wouldn’t be labeled. The team will receive a notification, and the branch will enter "broken build status". The team’s priority will be to put a new changeset on main with a fix for the test or tests that were broken. We don’t recommend that you go back (at least not usually) but simply create another task to fix the issue. It doesn’t mean we don’t strongly recommend root cause analysis to determine why something broke and whether a new test should be in the "quick test" phase for each task to prevent these kinds of errors to reach release tests.
This approach tries to get a valid solution for the slow build / slow test suite problem. New "release candidates" are created continuously, and each of them is eligible to be converted in a public release if it passes all tests.
The long-term goal is to reduce build and test times and get rid of this second stage, and stick to the "every single changeset on main is a valid release that can be deployed" mantra. But, at least, while you work on this and you keep it as an important goal, you can benefit from the improvements of task branches and trunk devel.
Big Bang integration
Big Bang integrations are the root of all evil in software development. So, while I think it is good to explain them here so you can all avoid them at all costs, I sort of fear I’m unchaining some wild sorcery.
(I have to thank my good friend and mentor, Wim Peeters, for the original graphics I’m going to display here. In 2006, only a few months after we started Plastic SCM, we had a local presentation where we introduced the product to companies nearby, long before it was even ready for production. Wim was so kind to travel to Spain and share his knowledge about software configuration management.)
It all starts with an individual or entire team making contributions to a codebase. They work in isolation, and the rest of the project doesn’t get their changes. It starts looking like this:

Then as they continue evolving, more and more changes make them depart from the starting point:

Then, finally, one day, probably weeks or even months after they started, they decide to merge back:

It wouldn’t be very problematic if only you did this, but if everybody else in the project was doing exactly the same, you end up with a huge integration problem. You hit a Big Bang integration.

This is the original reason behind the move from waterfall to an incremental process, the key reason for agile, continuous integration, task branches, and almost any other modern practice. Projects working this way spend far more time during the integration phase than during the actual development.
The solution is theoretically simple: If there is a painful step in the process, do it as early as possible and as frequently as possible until it is no longer a problem.
Individuals share their changes back as soon as possible:

And, the entire team does the same frequently:

And, as a result, frequent releases are created as a continuous flow of incremental improvement.

Big Bang no more.
Enter task branches, continuous integration, iterative software constructions, and incremental delivery.
Appendix D: 2 principles for project management
I consider two basic principles for project management and are deeply rooted in the "task branch" way of thinking: Have a fallback solution and provide great visibility.
Always have a fallback solution
I think I first read about it in "Rapid Development" by Steve McConnell. Anyway, since I first heard about this principle, it became my North Star for project management.
Things will go wrong, tasks will delay, everything will be harder than initially thought. And still, you’ll have deadlines to meet and promises to keep.
The best solution to this problem is having a fallback solution, and the entire task branch strategy is built around that.
Suppose you create weekly releases. Nowadays, weekly falls short and daily sounds much better, or even a few times a day. Anyway, let’s stick to weekly releases.
If you are on a delivery week and this week’s release is broken, you will be better served by getting last week’s stable release instead of rushing out to do last-minute changes. You will be able to negotiate, explain what is not there, and protect your team from long hours and endless weekends.
Everybody prefers to have 100% of the 80% than 80% of nothing.

The first option shows two complete features and one not even started. You can deliver two features and negotiate. You have a fallback. The second option shows you almost have everything done, but nothing is complete. You can’t deliver anything. You don’t have a fallback. Don’t be in that situation.
Maximize visibility
Ensure your customers, bosses, investors, colleagues, and anyone potentially interested in your project clearly sees that you are making progress.
Shout out loud and clear what you do, so everyone can see.
It might not sound humble, but it is much better than the opposite: Silence.
Silence must be good for unsung heroes in movies (well, they are in a movie anyway) but not that good for projects. Silence creates anxiety, alarm, and agitation.
It is better that you report progress before you are asked to provide it.
Regular, understandable, and precise progress is crucial, in my opinion, for any project.
And there’s no better progress reporting than working software. Documents and PowerPoints come and go, but working software stays.
Here is how everything comes together. Task branches are key to creating frequent stable releases. Frequent stable releases create lots of undeniable visibility. And visibility builds trust.